


Fuerza resultante | Las fuerzas que pueden actuar en una partícula pueden estar referencia en el plano o en el espacio. El sistema de fuerzas puede constar en una sola fuerza; como sistema de fuerzas aplicado. La importancia de poder determinar la fuerza resultante de un sistema de fuerzas concurrentes o determinar las condiciones para que un sistema de fuerzas concurrentes, se encuentren en equilibrio. |
| INTRODUCCIÓN: |
En esta lexia se estudiará el efecto de las fuerzas que actúan sobre las partículas. Primero se aprenderá a sustituir dos o más fuerzas que actúan sobre una partícula por una sola fuerza que tenga el mismo efecto que ellas. Esta fuerza equivalente solo es la resultante de las fuerzas varias que actúan sobre la partícula. Después se derivarán las relaciones que existen entre las distintas fuerzas que actúan sobre una partícula en un estado de equilibrio y se usarán para determinar algunas de las fuerzas que actúan sobre dicha partícula. El uso de la palabra “partícula” no significa que en esta lexia se limite al estudio de pequeños corpúsculos. Quiere decir que el tamaño y la forma de los cuerpos en consideración no afectará en la solución de los problemas tratados en esta lexia y que todas las fuerzas ejercidas sobre un cuerpo dado se supondrán aplicadas en un mismo punto. Puesto que tal suposición se verifica en muchas aplicaciones prácticas, se podrán resolver un buen número de problemas de ingeniería. La primera parte de esta lexia está dedicada al estudio de las fuerzas obtenidas en un mismo plano y la segunda al análisis de las fuerzas en el espacio tridimensional. |
| LA FUERZA EN EL PLANO |
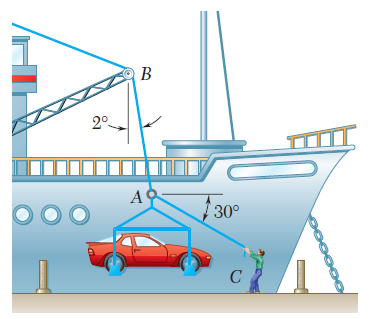
Una fuerza representa la acción de un cuerpo sobre otro y se caracteriza por su punto de aplicación, magnitud o módulo y dirección. Pero las fuerzas sobre una partícula tienen el mismo punto de aplicación. Por tanto, cada fuerza considerada en esta lexía estará completamente definida por su magnitud o módulo y dirección. La magnitud o módulo de una fuerza se caracteriza por cierto número de unidades. La dirección de una fuerza se define por la línea de acción y el sentido de la fuerza. La línea de acción es la línea recta infinita a lo largo de la cual actúa la fuerza; se caracteriza por el ángulo que forma con algún eje fijo (ver figura). |
Fuerza en el plano |
| RESULTANTE DE VARIAS FUERZAS CONCURRENTES |
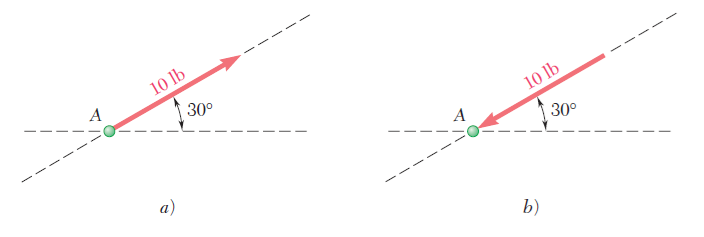
Considérese una partícula A sujeta a varias fuerzas coplanares, es decir, a varias fuerzas contenidas en el mismo plano (ver figura a). Como todas estas fuerzas pasan por un mismo punto común “A”, se dice que son concurrentes. Los vectores que representan las fuerzas que actúan sobre “A” pueden sumarse con la regla del polígono (ver figura b). |
Fuerzas concurrentes |
Puesto que el uso de la regla del polígono es equivalente a la aplicación repetida de la ley del paralelogramo, el vector R obtenido representa la resultante de las fuerzas concurrentes que intervienen, es decir, la fuerza que produce el mismo efecto sobre la partícula “A” que las fuerzas dadas. Como se indicó antes, no importa el orden en el que se sumen los vectores P, Q y S que representan las fuerzas sobre la partícula. |
| DESCOMPOSICIÓN DE UNA FUERZA EN SUS COMPONENTES |
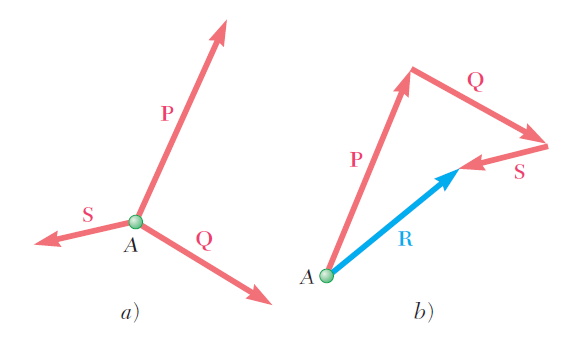
Se ha visto que dos o más fuerzas que actúan sobre una partícula pueden sustituirse por una sola fuerza que produce el mismo efecto sobre la partícula. De la misma manera, una sola fuerza F que actúa sobre una partícula puede reemplazarse por dos o más fuerzas que produzcan juntas el mismo efecto sobre la partícula. A estas fuerzas se les llama componentes de la fuerza original F, y al proceso de sustituirlas en lugar de F se le llama descomposición de la fuerza F en sus componentes. En este sentido, para cada fuerza F existe un número infinito de conjuntos de componentes. Los conjuntos de dos componentes P y Q son los más importantes en cuanto a aplicaciones prácticas se refiere. Pero aun en este caso, el número de formas en las que una fuerza F puede descomponerse en sus componentes es ilimitado (ver siguiente figura). |
Descomposición de una fuerza en sus componentes |
Dos casos son de especial interés:
La segunda componente, Q, se obtiene aplicando la regla del triángulo y uniendo la punta de P a la punta de F (ver siguiente figura); la magnitud, la dirección y el sentido de Q se determinan gráficamente o por trigonometría. Una vez que Q se ha determinado, ambas componentes P y Q deben aplicarse en A. |
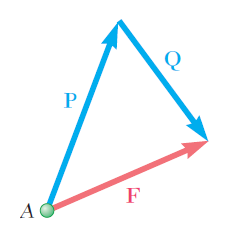
Regla del triángulo |
2. Se conoce la línea de acción de cada una de las componentes. La magnitud y la dirección de las componentes se obtiene al aplicar la ley del paralelogramo y trazando líneas, por la punta de F, paralelas a las líneas de acción dadas (ver siguiente figura). |
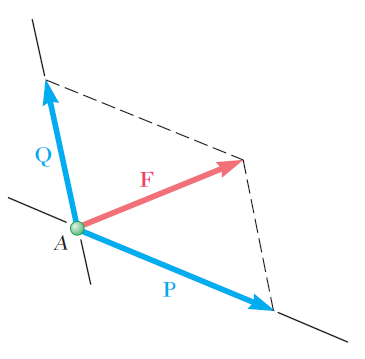
Ley del paralelogramo |
De esta forma se obtienen dos componentes bien definidas P y Q, que pueden determinarse gráficamente o por trigonometría aplicando la ley de los senos. Pueden encontrarse muchos otros casos; por ejemplo, cuando la dirección de una de las componentes se conoce y se busca que la magnitud de la otra sea lo más pequeña posible. Para efectos de comprender mejor este tema, puedes ver el ejemplo 1.1, o el ejemplo 1.2 |
Ejemplo 1.1 |
 Click aquí
Click aquí Ejemplo 1.2 |
| COMPONENTES RECTANGULARES DE UNA FUERZA. VECTORES UNITARIOS |
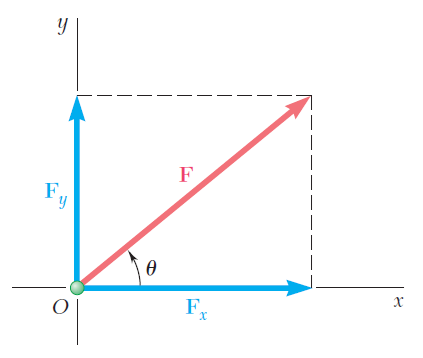
En muchos problemas será conveniente descomponer una fuerza en sus dos componentes perpendiculares entre sí. En la siguiente figura, la fuerza F se ha descompuesto en una componente Fx a lo largo del eje “x” y una componente Fy a lo largo del eje “y”. |
|
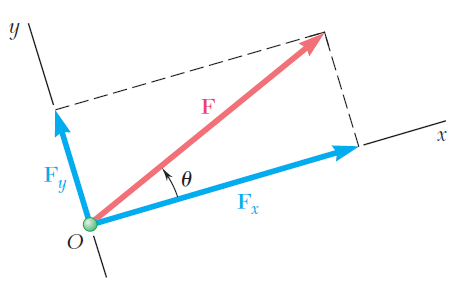
El paralelogramo trazado para obtener las dos componentes es un rectángulo, y las fuerzas Fx y Fy se llaman componentes rectangulares. Los ejes “x” y “y” suelen elegirse a lo largo de las direcciones horizontal y vertical, respectivamente, como se muestra en la figura; sin embargo, pueden seleccionarse en cualesquiera otras dos direcciones perpendiculares, tal como indica la siguiente figura. |
|
Para determinar las componentes rectangulares de una fuerza debe pensarse que las líneas de construcción mostradas en las figuras anteriores son paralelas a los ejes “x” y “y” en lugar de perpendiculares a ellos. Esta práctica ayudará a evitar errores en la determinación de componentes oblicuas. En este punto se introducirán dos vectores de magnitud unitaria dirigidos a lo largo de los ejes positivos “x” y “y”. A estos vectores se les llama vectores unitarios y se representan por i y j, respectivamente (ver siguiente figura). |
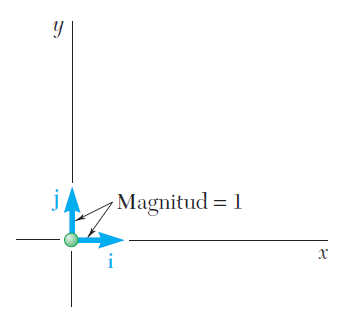
|
Al recordar la definición del producto de un escalar y un vector, se observa que las componentes rectangulares Fx y Fy de una fuerza F pueden obtenerse con la multiplicación de sus respectivos vectores unitarios i y j por escalares apropiados (ver siguiente figura). Se puede escribir: |
| 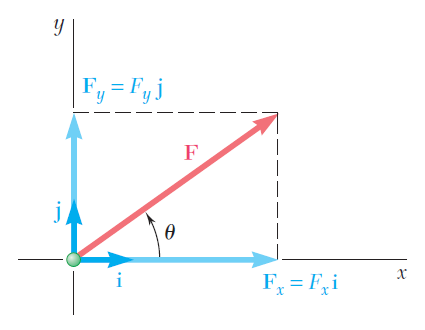
|



Mientras que los escalares Fx y Fy pueden ser positivos o negativos, dependiendo de la dirección, sus valores absolutos son respectivamente iguales a las magnitudes de las componentes de las fuerzas Fx y Fy. Los escalares Fx y Fy se llaman componentes escalares de la fuerza F, mientras que las componentes reales de la fuerza Fx y Fy son las componentes vectoriales de F. Sin embargo, cuando no existe alguna posibilidad de confusión, a los vectores y a las componentes escalares de F puede llamárseles simplemente componentes de F. Se observa que la componente escalar Fx es positiva cuando la componente vectorial Fx tiene la misma dirección que el vector unitario i (es decir, la misma dirección que el eje “x” positivo) y es negativa cuando Fx tiene dirección opuesta. Una conclusión semejante puede obtenerse observando el signo de la componente escalar Fy. Si se representa con F la magnitud de la fuerza F y con θ el ángulo entre F y el eje x, medido en giro contrario al movimiento de las manecillas del reloj desde el eje “x” positivo (ver figura anterior), se pueden expresar las componentes escalares de F como sigue:
Se observa que las relaciones obtenidas se satisfacen para cualquier valor del ángulo θ entre 0° y 360° y que éstas definen tanto los signos como los valores absolutos de las componentes escalares Fx y Fy. |


| ADICIÓN DE FUERZAS SUMANDO SUS COMPONENTES “X” Y “Y” |
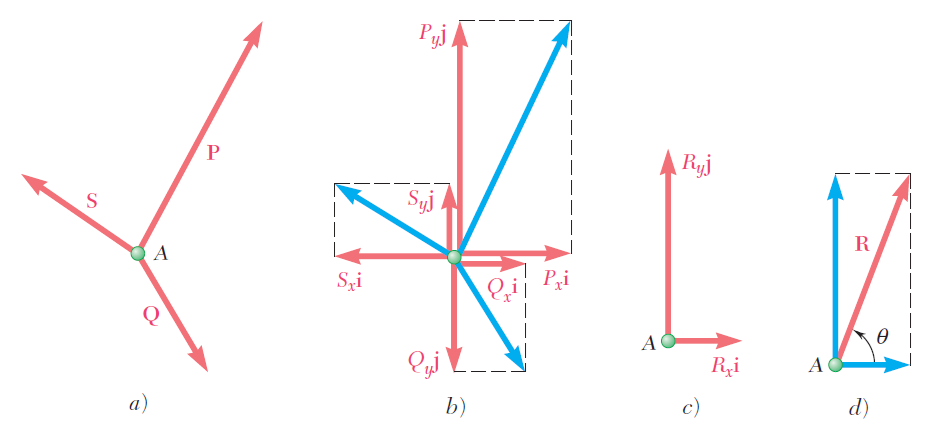
En la sección anterior se estudió que las fuerzas deben sumarse de acuerdo con la ley del paralelogramo. A partir de esta ley se derivaron otros dos métodos más directos aplicables a la solución gráfica de los problemas: la regla del triángulo para la suma de dos fuerzas y la regla del polígono para la adición de tres o más fuerzas. También se vio que el triángulo de fuerzas usado para definir la resultante de dos fuerzas podría usarse para obtener una solución trigonométrica. Cuando se van a sumar tres o más fuerzas, no puede obtenerse una solución trigonométrica práctica del polígono de fuerzas que define a la fuerza resultante. En este caso puede obtenerse una solución analítica del problema si se descompone cada fuerza en sus elementos rectangulares. Considere, por ejemplo, las tres fuerzas P, Q y S que actúan sobre una partícula A (ver figura a). Su resultante R está definida por la relación
Si se descompone cada fuerza en sus componentes rectangulares, se escribe
De donde se tiene
O en forma breve
|







|
Por tanto, se puede concluir que las componentes escalares Rx y Ry de la resultante R de varias fuerzas que actúan sobre una partícula se obtienen separando de manera algebraica las correspondientes componentes escalares de las fuerzas dadas. En la práctica, la determinación de la resultante R se realiza en tres etapas, como se ilustra en las figuras anteriores. Primero, las fuerzas mostradas en la figura “a” se descomponen en sus componentes “x” y “y”. En la figura “b”, con la suma de estas componentes “x” y “y” de R. figura “c”, finalmente, la resultante:
Se determina aplicando la ley del paralelogramo (ver figura “d”). El procedimiento que se acaba de describir se realiza con más eficiencia si los cálculos se tabulan. Aunque éste es el único método analítico práctico para la adición de tres o más fuerzas, con frecuencia también se le prefiere sobre la solución trigonométrica en el caso de la suma de dos fuerzas.
Para efectos de comprender mejor este tema, puedes ver el ejemplo 1.3 |

Ejemplo 1.3 |
| EQUILIBRIO DE UNA PARTÍCULA |
En las secciones anteriores se expusieron los métodos utilizados para determinar la resultante de varias fuerzas que actúan sobre una partícula. Aunque no ha ocurrido en ninguno de los problemas examinados hasta ahora, es posible que la resultante sea cero. En tal caso, el efecto neto de las fuerzas dadas es cero, y se dice que la partícula está en equilibrio. Entonces se tiene la siguiente definición: si la resultante de todas las fuerzas que actúan sobre una partícula es cero, la partícula se encuentra en equilibrio. Una partícula sometida a la acción de dos fuerzas estará en equilibrio si ambas fuerzas tienen la misma magnitud, la misma línea de acción, pero direcciones opuestas. Entonces la resultante de las dos fuerzas es cero. En la siguiente figura, se ilustra este caso. |
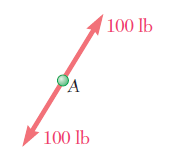
|
Otro caso de una partícula en equilibrio se muestra en la siguiente figura, donde aparecen cuatro fuerzas que actúan sobre “A” |
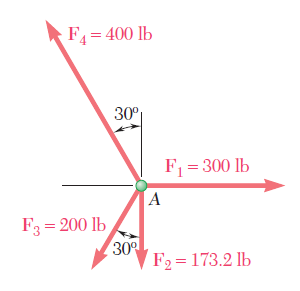
|
En la siguiente figura, la resultante de las fuerzas dadas se determina por la regla del polígono. |
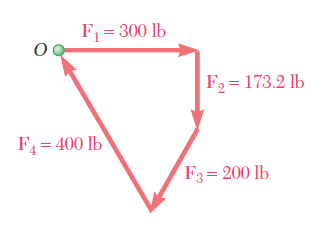
|
Empezando en el punto “O” con F1 y acomodando las fuerzas punta a cola, se encuentra que la punta de F4 coincide con el punto de partida “O”, así que la resultante R del sistema de fuerzas dado es cero y la partícula está en equilibrio. El polígono cerrado de la figura anterior proporciona una expresión gráfica del equilibrio de “A”. Para expresar en forma algebraica las condiciones del equilibrio de una partícula se escribe
Descomponiendo cada fuerza F en sus componentes rectangulares, se tiene
Se concluye que las condiciones necesarias y suficientes para el equilibrio de una partícula son
Para efectos de comprender mejor este tema, puedes ver el ejemplo 1.4, ejemplo 1.5, ejemplo 1.6, |





Ejemplo 1.4 |
Ejemplo 1.5 |
Ejemplo 1.6 |
| G. 01 |  S.M. S.M. |
| FUERZAS EN EL ESPACIO |
| COMPONENTES RECTANGULARES DE UNA FUERZA EN EL ESPACIO |
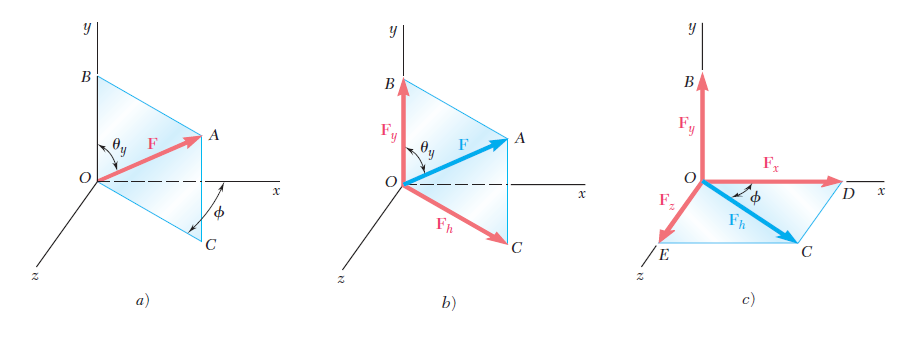
Los problemas considerados en la primera parte de esta lexía involucraron únicamente dos dimensiones y pudieron formularse y resolverse en un solo plano. En esta sección y en las secciones siguientes del capítulo se analizarán problemas que comprenden las tres dimensiones del espacio. Considere una fuerza F que actúa en el origen “O” del sistema de coordenadas rectangulares x, y, z. Para definir la dirección de F, se traza el plano vertical OBAC que contiene a F y que se muestra en la figura “a”. Este plano pasa a través del eje vertical y; su orientación está definida por el ángulo que forma con el plano “xy”, mientras que la dirección de F dentro del plano está definida por el ángulo θy que forma F con el eje “y”. La fuerza F puede descomponerse en una componente vertical Fy y una componente horizontal Fh; esta operación, mostrada en la figura “b”, se realiza en el plano OBAC de acuerdo con las reglas desarrolladas en la primera parte de esta lexia. Las componentes escalares correspondientes son:
|


|
La Fh puede descomponerse en sus dos componentes rectangulares Fx y Fz a lo largo de los ejes “x” y “z”, respectivamente. Esta operación, mostrada en la figura “c”, se realiza en el plano “xz”. De esta manera se obtienen las expresiones siguientes para las componentes escalares correspondientes:
La fuerza F se ha descompuesto en tres componentes vectoriales rectangulares Fx, Fy y Fz, dirigidas a lo largo de los tres ejes coordenados. Si se aplica el teorema de Pitágoras a los triángulos OAB y OCD, de la figura anterior, se escribe
Si se eliminan F2h de estas dos ecuaciones y se resuelve para F se obtiene la siguiente relación entre la magnitud de F y sus componentes rectangulares escalares:
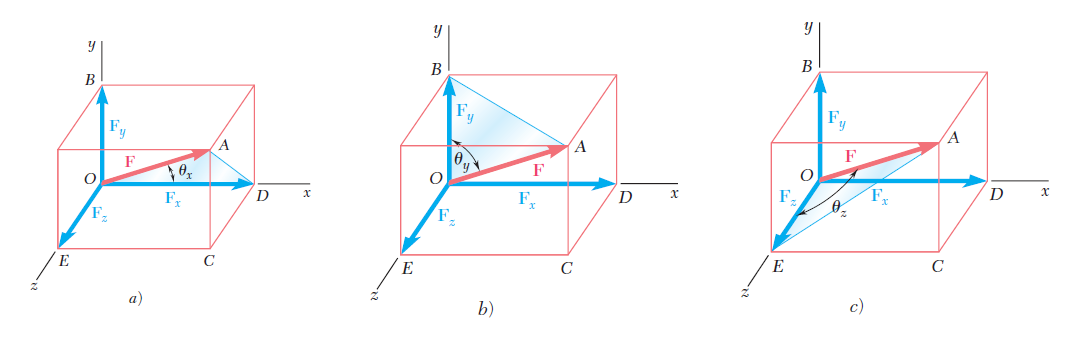
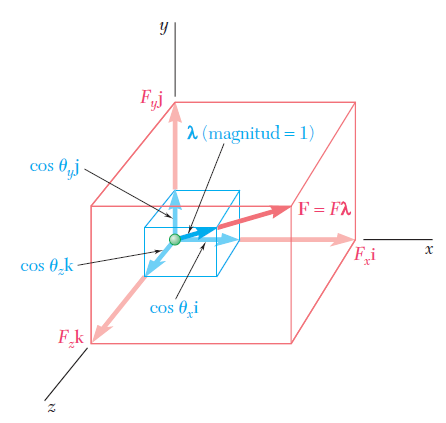
La relación que existe entre la fuerza F y sus tres componentes Fx, Fy y Fz se presenta más fácil si se traza “una caja” que tiene por aristas Fx, Fy y Fz, como se muestra en las figuras anteriores. La fuerza F está representada por la diagonal OA de esta caja. La figura “b” muestra el triángulo rectángulo OAB empleado para deducir la primera de las fórmulas anteriores
En las figuras “a” y “c” se han trazado otros dos triángulos rectángulos: el OAD y OAE. Éstos ocupan posiciones semejantes a la del triángulo OAB. Si representamos por θx y θz los ángulos que forma F con los ejes “x” y “z”, respectivamente, se pueden escribir dos fórmulas semejantes a
|





|
Entonces se escribe:
Los tres ángulos θx, θy y θz definen la dirección de la fuerza F; y son más usados que los ángulos θy y Φ introducidos al comienzo de esta sección. Los cosenos de θx, θy y θz se conocen como los cosenos directores de la fuerza F. |


|
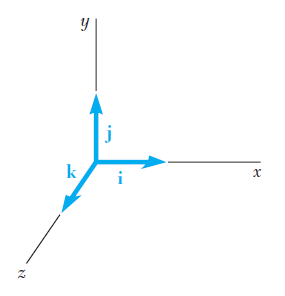
Con el uso de los vectores unitarios i, j y k, dirigidos a lo largo de los ejes “x”, “y” y “z”, respectivamente (ver figura anterior), se puede expresar F en la forma
donde las componentes escalares Fx, Fy y Fz están definidas por las relaciones anteriores. El ángulo que una fuerza F forma con un eje debe medirse desde el lado positivo del eje y estará siempre comprendido entre 0 y 180°. Un ángulo θx menor que 90° (agudo) indica que F (que se supone unida al origen O) está del mismo lado del plano “yz” que el eje x positivo, y cos θx y Fx serán positivos. Un ángulo θx mayor que 90° (obtuso) indicará que F está al otro lado del plano “yz”; entonces, cos θx y Fx serán negativos. Si se sustituye en la ecuación anterior las expresiones obtenidas para Fx, Fy y Fz, se escribe
que muestra que la fuerza F puede expresarse como el producto del escalar F y del vector
El vector λ es evidentemente un vector de magnitud 1 y de la misma dirección que F (ver figura). |



|
El vector unitario λ se refiere al largo de la línea de acción de F. Se deduce que las componentes λ del vector unitario λ son, respectivamente, iguales a los cosenos directores de la línea de acción de F:
Se debe observar que los valores de los tres ángulos θx, θy y θz no son independientes. Expresando que la suma de los cuadrados de las componentes de λ es igual al cuadrado de su magnitud, se escribe
o sustituyendo para λx, λy y λz de la ecuación anterior
Cuando las componentes Fx, Fy y Fz de una fuerza F están dadas, la magnitud F de la fuerza se obtiene de la ecuación anterior. Entonces las relaciones anteriores pueden resolverse para los cosenos directores,
y obtener los ángulos θx, θy y θz que caracterizan a la dirección de F. |








| FUERZA DEFINIDA EN TÉRMINOS DE SU MAGNITUD Y DOS PUNTOS SOBRE SU LÍNEA DE ACCIÓN |
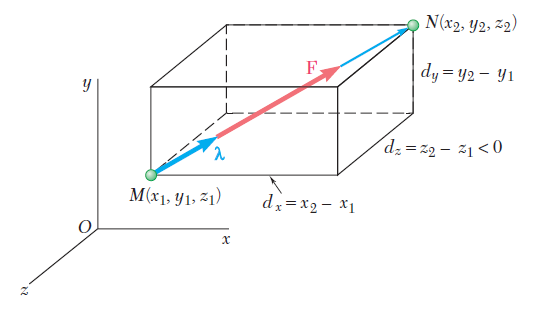
En muchas aplicaciones la dirección de una fuerza F está definida por las coordenadas de dos puntos M(x1, y1, z1) y N(x2, y2, z2), localizadas sobre su línea de acción (ver siguiente figura). |
|
Considere el vector
El vector unitario λ a lo largo de la línea de acción de F (es decir a lo largo de la línea MN) puede obtenerse al dividir el vector
Es importante recordar que F es igual al producto de F y λ, por lo que se tiene
de la cual se sigue que las componentes de F son, respectivamente,
Las relaciones anteriores simplifican en forma considerable la determinación de las componentes de las fuerzas F de magnitud F cuando la línea de acción de F está definida por dos puntos M y N. Restando las coordenadas de M de las de N se determinan primero las componentes del vector
Sustituyendo los valores para F y para dx, dy, dz y “d” en las relaciones anteriores, se obtienen las componentes Fx, Fy y Fz de la fuerza. Los ángulos θx, θy y θz que forman F con los ejes coordenados pueden obtenerse de las ecuaciones anteriores. Comparando las ecuaciones, también se puede escribir
Y determinar los ángulos θx, θy, y θz directamente de las componentes y la magnitud del vector |














| ADICIÓN DE FUERZAS CONCURRENTES EN EL ESPACIO |
La resultante R de dos o más fuerzas en el espacio se calcula sumando sus componentes rectangulares. Los métodos gráficos o trigonométricos no son muy prácticos en el caso de fuerzas en el espacio. El método seguido aquí es semejante al empleado en la sección anterior, con fuerzas coplanares. Se establece que
se descompone cada fuerza en sus componentes rectangulares y se escribe
de la cual se deduce que
La magnitud de la resultante y los ángulos θx, θy y θz que ésta forma con el eje de coordenadas se obtienen
Para efectos de comprender mejor este tema, puedes ver el ejemplo 1.7, ejemplo 1.8 |







Ejemplo 1.7 |
Ejemplo 1.8 |
| EQUILIBRIO DE UNA PARTÍCULA EN EL ESPACIO |
De acuerdo con la definición dada en la sección anterior, una partícula “A” está en equilibrio si la resultante de todas las fuerzas que actúan sobre “A” es cero. Las componentes Rx, Ry y Rz de la resultante están dadas por las siguientes relaciones, al expresar que las componentes de la resultante son cero, se escribe
Las ecuaciones anteriores, representan las condiciones necesarias y suficientes para lograr el equilibrio de una partícula en el espacio. Estas ecuaciones pueden usarse para resolver problemas que tratan con el equilibrio de una partícula y en los que intervienen no más de tres incógnitas. Para resolver tales problemas, se traza un diagrama de cuerpo libre donde se muestre a la partícula en equilibrio y todas las fuerzas que actúan sobre ella. Deben escribirse las ecuaciones de equilibrio anteriores y despejar las tres incógnitas. En los tipos de problemas más comunes, esas incógnitas representan:
Para efectos de comprender mejor este tema, puedes ver el ejemplo 1.9 |

Ejemplo 1.9 |
| G. 02 | S.M. |
Trabajo de Fin de Lexia | |
ACTIVIDAD FIN DE LA LEXIA |