


| Cuando una fuerza o un sistema de fuerzas actúa sobre un cuerpo rígido, puede generar un momento (o torque) con respecto a un punto o un eje específico. Además, este sistema de fuerzas puede ser sustituido por un sistema equivalente conocido como "fuerza-par". Un sistema "fuerza-par" tiene la capacidad de ser reducido a una resultante, ya sea como una fuerza simple o como un momento de torsión, ofreciendo así una forma práctica de análisis y simplificación en la resolución de problemas relacionados con estructuras y cuerpos rígidos. |
| INTRODUCCIėN: |
Dos sistemas de fuerzas son equivalentes, cuando cada una de ellas, aplicadas en forma independiente a un mismo cuerpo, le produce el mismo efecto. Todo sistema de fuerzas tiene infinidad de sistemas equivalente, pero de todos ellos existe uno que es el más sencillo. El sistema equivalente más simple se denomina resultante, por lo cual es un sistema irreducible. La resultante de un sistema puede ser una fuerza, una cupla o un torsor. La fuerza ya fue estudiada en la lexía anterior. |
La Cupla |
 Click aquĒ
Click aquĒ El Torsor |
| La resultante de un sistema de fuerzas coplanares puede ser una fuerza o una cupla. La resultante de un sistema de fuerzas no coplanar puede ser una fuerza, una cupla o un torsor. Cuando el sistema de fuerzas no tiene resultante, el sistema de fuerzas está en equilibrio. Si en un sistema de fuerzas, la resultante se aplica en dirección contraria ésta recibe el nombre de equilibrarte. La resultante aplicada en dirección contraria, equilibra al sistema. |
| MOMENTO DE UNA FUERZA CON RESPECTO A UN PUNTO |
Es la causa capaz de producir, cesar o modificar un movimiento de rotación alrededor de un punto. Análisis en el plano Muchas aplicaciones tratan con estructuras bidimensionales, es decir, estructuras cuyo espesor es despreciable en comparación con su longitud y su anchura, las cuales están sujetas a fuerzas contenidas en su mismo plano. Dichas estructuras bidimensionales y las fuerzas que actúan sobre ellas pueden representarse fácilmente sobre una hoja de papel o sobre una pizarra. Por tanto, su análisis es más simple que el correspondiente al caso de las estructuras y fuerzas tridimensionales. |
|
|
Para efectos de comprender mejor este tema, puedes ver el ejemplo. |
| Anßlisis tridimensional |
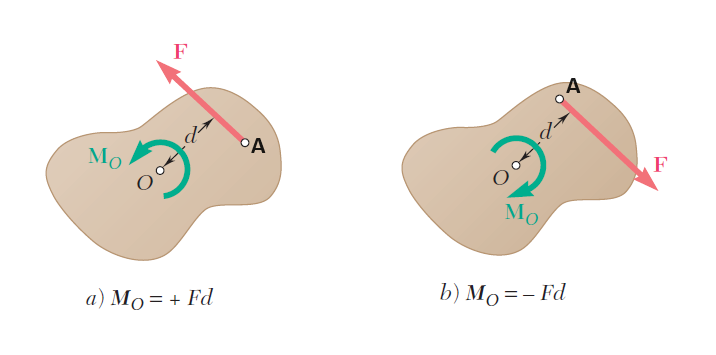
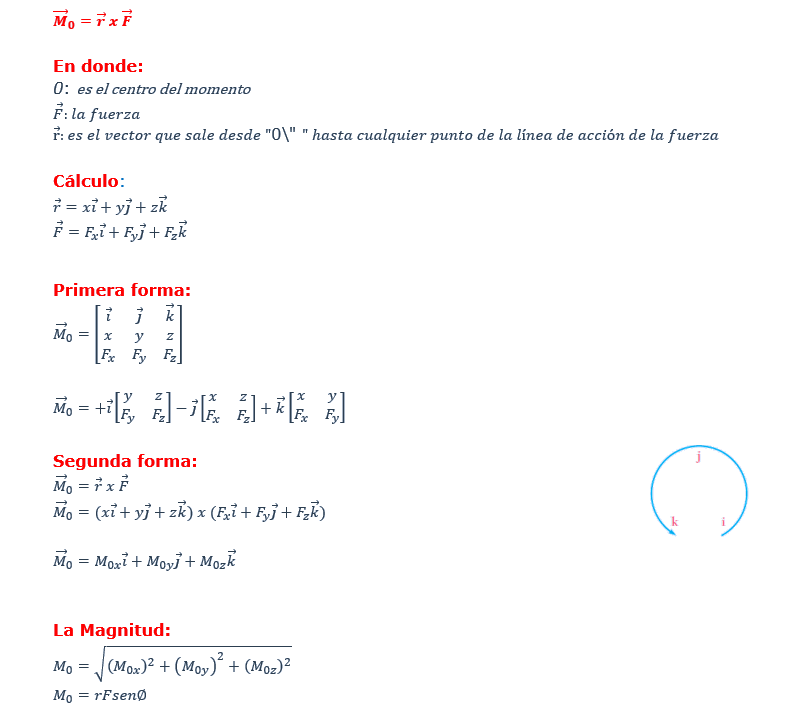
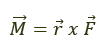
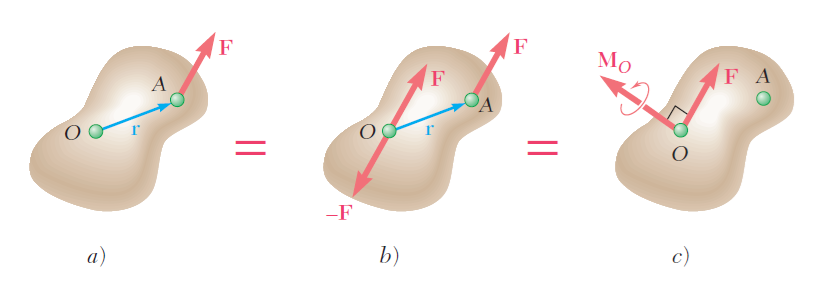
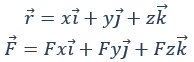
Considere una fuerza “F” que actúa sobre un punto de un cuerpo, como se sabe, la fuerza “F” está representada por un vector que define la magnitud y su dirección. Sin embargo, el efecto de la fuerza sobre el punto de un cuerpo también depende de su punto de aplicación “A”. La posición de “A” puede definirse de manera conveniente por medio del vector “r” que une al punto de referencia fijo “O” con “A”; a este vector se le conoce como el vector de posición de “A”. El vector de posición “r” y la fuerza “F” definen el plano mostrado en la figura. El momento de “F” con respecto a “O” se define como el producto vectorial de “r” y “F”: Definición: | 
|
|
Si deseas comprender mejor este tema, puedes ver el ejemplo |
| G. 01 |  S.M. S.M. |
| MOMENTO DE UNA FUERZA CON RESPECTO A UN EJE |
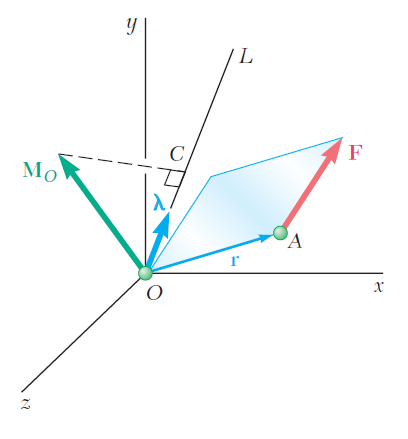
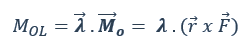
Es la causa capaz de producir, cesar o modificar un movimiento de rotación alrededor de un eje. Ahora que se ha incrementado el conocimiento del álgebra vectorial, se puede introducir un nuevo concepto: momento de una fuerza con respecto a un eje. Considérese nuevamente la fuerza “F” que actúa sobre un cuerpo rígido y el momento “M0” de dicha fuerza con respecto a “O” (figura anterior). Sea “OL” un eje a través de “O”; el momento “MOL” de “F” con respecto a “OL” se define como la proyección “OC” del momento “M0” sobre el eje “OL”. Representando al vector unitario a lo largo de “OL” como 𝛌 y recordando, de la sección anterior, se puede obtener:
| 
|
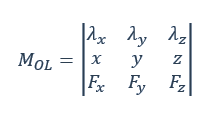
Lo cual demuestra que el momento “MOL” de “F” con respecto al eje “OL” es el escalar que se obtiene formando el producto triple escalar de 𝛌, r y F. Expresando a “MOL” en forma de determinante, se puede escribir:
En donde: 𝛌x, 𝛌y, 𝛌z: son los cosenos directores del OL x, y, z: coordenadas del punto de aplicación de “F” Fx. Fy, Fz: componentes de la fuerza “F” |
Si deseas comprender mejor este tema, puedes ver el ejemplo |
| MOMENTO DE UN PAR DE FUERZAS |
Se dice que dos fuerzas “F” y “– F” que tienen la misma magnitud, líneas de acción paralelas y direcciones opuestas forman un par (ver imagen). Obviamente, la suma de las componentes de las dos fuerzas en cualquier dirección es igual a cero. Sin embargo, la suma de los momentos de las dos fuerzas con respecto a un punto dado no es cero. Aunque las dos fuerzas no originarán una traslación del cuerpo sobre el que están actuando, éstas sí tenderán a hacerlo rotar. | 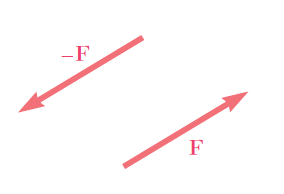
|
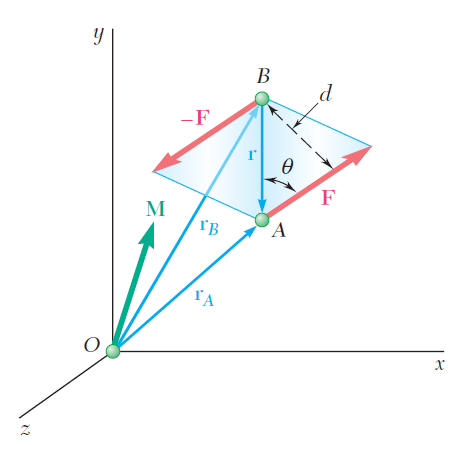
Al representar con “rA” y “rB”, respectivamente, a los vectores de posición de los puntos de aplicación de “F” y “– F” (ver siguiente figura), se encuentra que la suma de los momentos de las dos fuerzas con respecto a “O” es:
|

|
Si se define rA – rB = r, donde “r” es el vector que une los puntos de aplicación de las dos fuerzas, se concluye que la suma de los momentos de “F” y “– F”, con respecto a “O”, está representado por el vector:
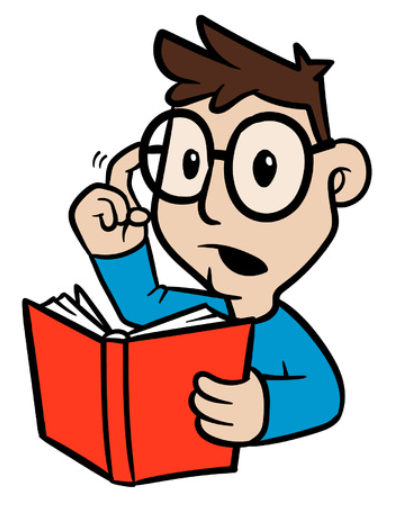
El vector “M” se conoce como el momento del par; se trata de un vector perpendicular al plano que contiene las dos fuerzas y su magnitud está dada por:
donde “d” es la distancia perpendicular entre las líneas de acción de “F” y “– F”. La dirección de “M” está definido por la regla de la mano derecha. |
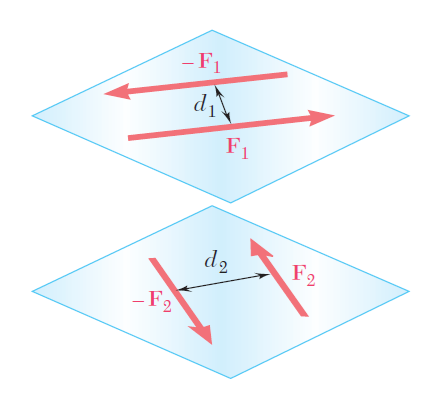
| A partir de la definición del momento de un par también se concluye que dos pares, uno constituido por las fuerzas “F1” y “– F1”, y el otro constituido por las fuerzas “F2” y “– F2” (ver figura) tendrán momentos iguales si:
y si los dos pares se encuentran en planos paralelos (o en el mismo plano) y tienen la misma dirección. |
Para comprender mejor el tema, el momento de un par de fuerzas en el plano, puedes ver el ejemplo |
Para comprender mejor el tema, el momento resultante de un sistema de pares de fuerzas en el plano, puedes ver el ejemplo |
Para comprender mejor el tema, el momento de un par de fuerzas en el espacio, puedes ver el ejemplo |
Para comprender mejor el tema, el momento resultante de un sistema de pares de fuerzas en el espacio, puedes ver el ejemplo |
| G. 02 | S.M. |
| DESCOMPOSICION DE UNA FUERZA DADA EN UNA FUERZA EN ōOö Y UN PAR |
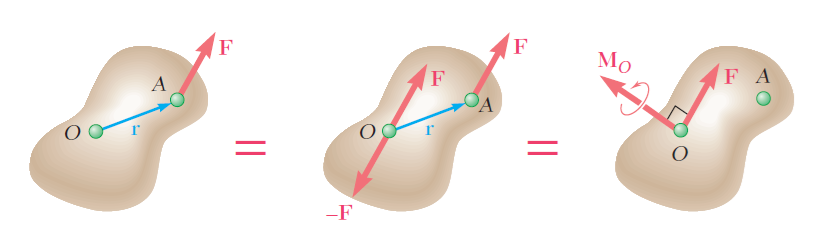
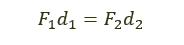
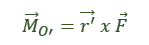
Considere una fuerza “F” que actúa sobre un cuerpo rígido en un punto “A” definido por el vector de posición “r” (ver siguiente figura “a”). Suponga que por alguna razón se quiere que la fuerza actúe en el punto “O”. Aun que “F” se puede mover a lo largo de su línea de acción (principio de transmisibilidad), no es posible moverla al punto “O”, que no se encuentra sobre la línea de acción original de la fuerza, sin modificar el efecto que “F” tiene sobre el cuerpo rígido. |
|
Sin embargo, pueden unirse dos fuerzas al punto “O”, una igual a “F” y otra igual a “– F”, sin modificar el efecto que la fuerza original tiene sobre el cuerpo rígido (ver figura anterior b). Como una consecuencia de esta transformación, ahora una fuerza “F” se aplica en “O”; las otras dos fuerzas forman un par con un momento:
Por tanto, cualquier fuerza “F” que actúe sobre un cuerpo rígido pue de ser trasladada a un punto arbitrario “O” siempre y cuando se agregue un par cuyo momento sea igual al momento de “F” con respecto a “O”. El par tiende a impartirle al cuerpo rígido el mismo movimiento de rotación alrededor de “O” que la fuerza “F” ocasionaba antes de que fuera trasladada al punto “O”. El par se representa por el vector de par “MO” que es perpendicular al plano que contiene a “r” y a “F”. Como “MO” es un vector libre, puede ser aplicado en cualquier lugar; sin embargo, por conveniencia, usualmente el vector de par se fıja en “O”, junto con “F”, y se hace referencia a la combinación obtenida como un sistema fuerza-par (ver figura anterior “c”). Si la fuerza “F” se hubiera trasladado del punto “A” a un punto diferente O’ (ver siguiente figura “a” y “c”), se tendría que calcular el momento:
de “F” con respecto a O’ y se hubiera fijado a O’ un nuevo sistema fuerza-par constituido por “F” y por el vector de par “MO’”. La relación que existe entre los momentos de “F” con respecto a O y a O’ se obtiene:
donde “s” es el vector que une a O’ con O. De esta manera, el momento “MO’” de “F” con respecto a O’ se obtiene sumándole al momento “MO” de “F” con respecto a “O” el producto vectorial (s x F) que representa el momento con respecto a O’ de la fuerza “F” aplicada en “O”. |

|
Este resultado también pudo obtenerse observando que, para trasladar a O’ al sistema fuerza-par unido a O (figura anterior “b” y “c”), el vector de par “MO” se puede mover libremente a O’ sin embargo, para mover la fuerza “F” de O a O’ es necesario agregarle a “F” un vector de par cuyo momento sea igual al momento con respecto a O’ de la fuerza “F” aplicada en O. Por tanto, el vector de par “MO’” debe ser igual a la suma de “MO” y el vector (s x F). Como ya se ha mencionado, el sistema fuerza-par obtenido a partir de trasladar una fuerza “F” de un punto “A” a un punto “O” consta de un vector de fuerza “F” y de un vector de par “MO” perpendicular a “F”. Por el contrario, cualquier sistema fuerza-par que conste de una fuerza “F” y de un vector de par “MO” que sean mutuamente perpendiculares, puede ser reemplazado por una sola fuerza equivalente. Esto se lleva a cabo moviendo la fuerza “F” en el plano perpendicular a “MO” hasta que su momento con respecto a “O” sea igual al momento del par que se desea eliminar. |
Ejemplo 1: Fuerzas equivalentes |
Ejemplo 2: Fuerzas equivalentes |
| REDUCCIėN DE UN SISTEMA DE FUERZAS A UNA FUERZA Y A UN PAR |
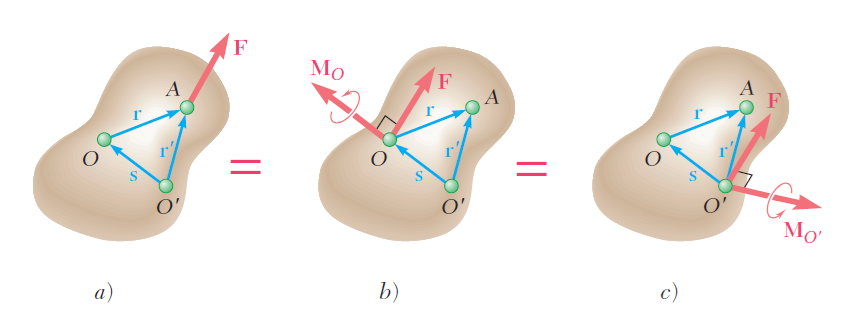
Considérese un sistema de fuerzas F1, F2, F3, . . . que actúan sobre un cuerpo rígido en los puntos A1, A2, A3, . . ., definidos por los vectores de posición r1, r2, r3, etc. (ver la siguiente figura “a”). Como se vio en la sección anterior, F1 puede ser trasladada de A1 a un punto dado “O”, si se agrega al sistema original de fuerzas un par de momento M1, igual al momento (r1 x F1) de F1 con respecto a “O”. |
|
Si se repite este procedimiento con F2, F3, . . ., se obtiene el sistema mostrado en la fıgura anterior “b” que consta de: las fuerzas originales, ahora actuando en “O”, y los vectores de par que han sido agregados. Como ahora las fuerzas son concurrentes, pueden ser sumadas vectorialmente y reemplazadas por su resultante “R”. De manera similar, los vectores de par M1, M2, M3, .... pueden sumarse vectorialmente y ser reemplazados por un solo vector de par “MRO”. Por tanto, cualquier sistema de fuerzas, sin importar qué tan complejo sea, puede ser reducido a un sistema equivalente fuerza-par que actúa en un punto dado “O” (ver fıgura anterior “c”). Se debe observar que mientras cada uno de los vectores de par M1, M2, M3, . . ., en la fıgura anterior “b” es perpendicular a la fuerza que le corresponde, en general la fuerza resultante “R” y el vector de par resultante “MRO” en la figura anterior “c” no serán perpendiculares entre sí. El sistema equivalente fuerza-par está definido por las ecuaciones:
... las cuales expresan que la fuerza “R” se obtiene sumando todas las fuerzas del sistema, mientras que el momento del vector de par resultante “MRO”, denominado momento resultante del sistema, se obtiene sumando los momentos de todas las fuerzas del sistema con respecto a “O”. |

|
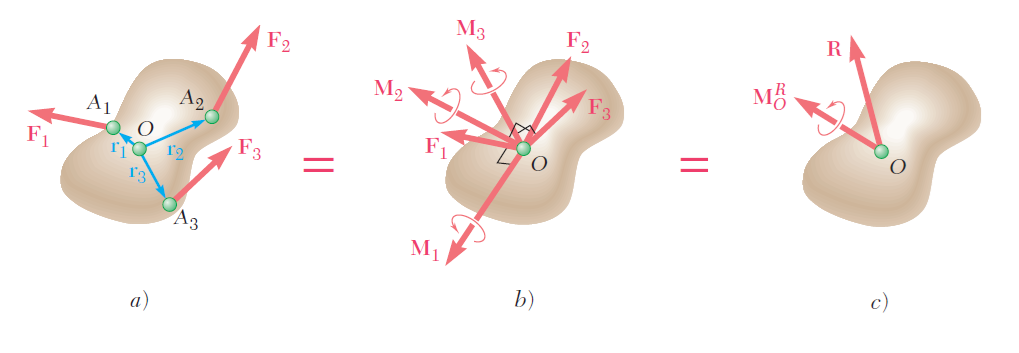
Una vez que un sistema de fuerzas dado se ha reducido a una fuerza y un par que actúa en el punto “O”, dicho sistema puede reducirse a una fuerza y un par actuando en cualquier otro punto O’. Mientras que la fuerza resultante “R” permanecerá inalterada, el nuevo momento resultante “MRO’” será igual a la suma de “MRO” y el momento con respecto a O’ de la fuerza “R” unida a “O” (ver figura anterior). Entonces se tiene:
En la práctica, la reducción de un sistema de fuerzas dado a una sola fuerza “R” actuando en “O” y un vector de par “MRO” será llevada a cabo en términos de las componentes. Descomponiendo cada vector “r” y cada fuerza “F” del sistema en sus componentes rectangulares, se escribe:
Al sustituir “r” y “F” en “MRO” y factorizar a los vectores unitarios i, j y k, se obtiene la siguiente expresión para “R” y “MRO”:
Las componentes “Rx”, “Ry”, “Rz” representan, respectivamente, las sumas de las componentes “x”, “y” y “z” de las fuerzas dadas y miden la tendencia del sistema a impartir al cuerpo rígido un movimiento de traslación en la dirección de “x”, “y” o “z”. Asimismo, las componentes Si se desea conocer la magnitud y la dirección de la fuerza “R”, éstas se pueden obtener a partir de las componentes “Rx”, “Ry” y “Rz” por medio de las relaciones (estudiados en la lexía anterior) cálculos similares proporcionarán la magnitud y la dirección del vector de par “MRO”. |

Si deseas comprender mejor este tema, puedes ver el ejemplo |
| OTRAS REDUCCIONES DE UN SISTEMA DE FUERZAS |
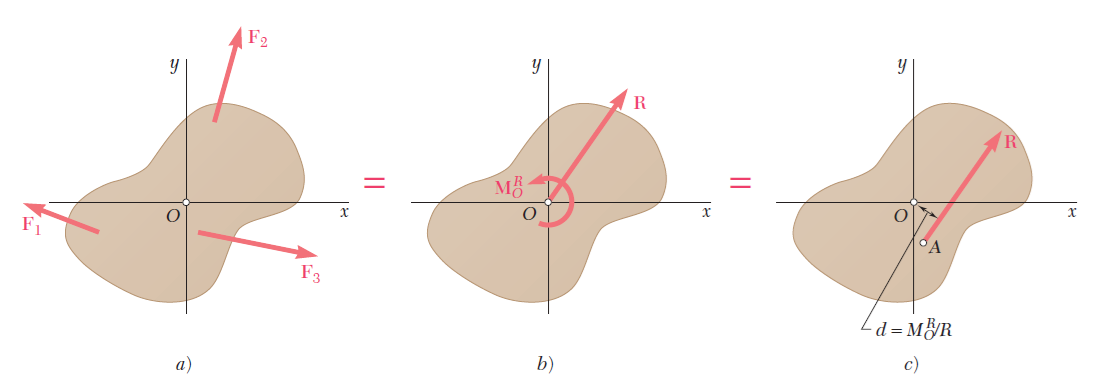
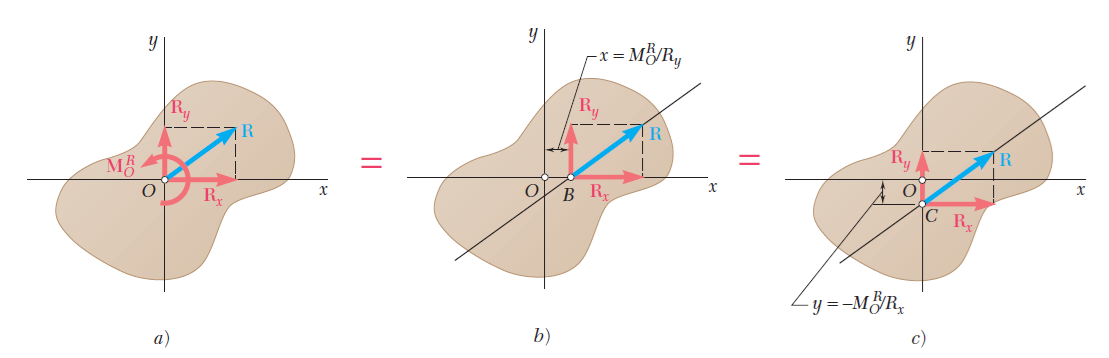
En la sección anterior se vio que cualquier sistema de fuerzas que actúa sobre un cuerpo rígido puede ser reducido a un sistema equivalente fuerza-par en “O”, que consta de una fuerza “R” igual a la suma de fuerzas del sistema y de un vector de par “MRO” cuyo momento es igual al momento resultante del sistema. Cuando R = 0, el sistema fuerza-par se reduce a un vector de par “MRO”. Entonces, el sistema de fuerzas dado puede ser reducido a un solo par, que recibe el nombre de par resultante del sistema. A continuación, se procede a investigar las condiciones necesarias para que un sistema dado de fuerzas pueda ser reducido a una sola fuerza. A partir de la sección anterior se concluye que un sistema fuerza-par en “O” pue de ser reemplazado por una sola fuerza “R” que actúa a lo largo de una nueva línea de acción si “R” y “MRO” son mutuamente perpendiculares. Por tanto, los sistemas de fuerzas que pueden ser reducidos a una sola fuerza o resultante, son aquellos sistemas para los cuales la fuerza “R” y el vector de par “MRO” son mutuamente perpendiculares. Aun que, en general, esta condición no se cumplirá para sistemas de fuerzas en el espacio, sí se cumplirá para sistemas constituidos por 1) fuerzas concurrentes, 2) fuerzas coplanares o 3) fuerzas paralelas. Estos tres casos se estudiarán en forma separada. 1. Las fuerzas concurrentes están aplicadas en el mismo punto y, por tanto, pueden ser sumadas directamente para obtener su resultante “R”. Por consiguiente, éstas siempre se reducen a una sola fuerza. Las fuerzas concurrentes se analizan en detalle en la lexía anterior. 2. Las fuerzas coplanares actúan en el mismo plano, el cual se puede suponer que es el plano de la figura (ver siguiente figura “a”). La suma “R” de las fuerzas del sistema también estará en el plano de la figura, mientras que el momento de cada fuerza con respecto al “O” y, por consiguiente, el momento resultante “MRO” serán perpendiculares a dicho plano. De esta forma, el sistema fuerza-par en “O” está constituido por una fuerza “R” y por un vector de par “MRO” que son mutuamente perpendiculares (ver siguiente figura “b”). Estas fuerzas pueden reducirse a una sola fuerza “R”, moviendo “R” en el plano de la figura hasta que su momento con respecto a “O” sea igual a “MRO”. La distancia desde “O” hasta la línea de acción de “R” es d = MRO/R OR (ver siguiente figura “c”). |
|
Como se señaló en la sección anterior, la reducción de un sistema de fuerzas se simplifica considerablemente si las fuerzas se descomponen en sus componentes rectangulares. De esta manera, el sistema fuerza-par en “O” está caracterizado por las componentes (ver siguiente figura “a”). |
|
Para reducir el sistema de fuerzas a una sola fuerza “R”, se expresa que el momento de “R” con respecto a “O” debe ser igual a “MRO”. Representando con “x” y “y” las coordenadas del punto de aplicación de la resultante y teniendo en cuenta la fórmula:
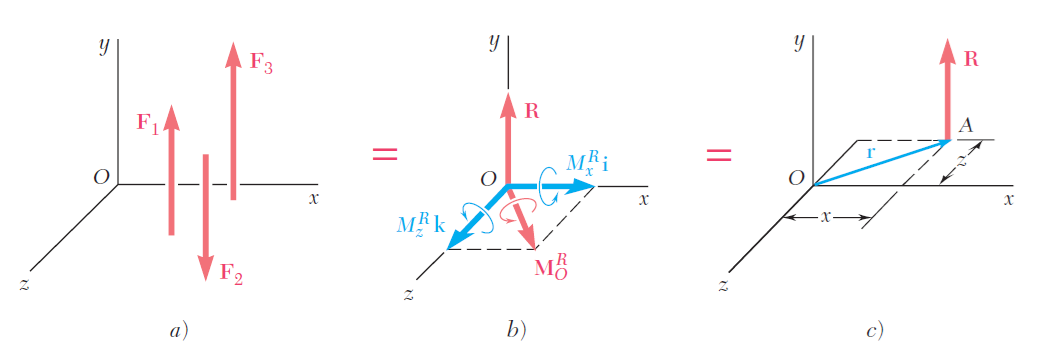
La cual representa la ecuación de la línea de acción de “R”. También pueden determinarse en forma directa las intersecciones con el eje “x” y con el eje “y” de la línea de acción de la resultante, se observa que “MRO” debe ser igual al momento con respecto a “O” de la componente y de “R” cuando “R” está unida a “B” (ver figura anterior “b”) e igual también al momento de la componente “x” cuando “R” está unida a “C” (ver figura anterior “c”). 3. Las fuerzas paralelas tienen líneas de acción paralelas y pueden o no tener la misma dirección. Suponga que las fuerzas son paralelas al eje y (ver siguiente figura “a”), se observa que su suma “R” también será paralela al eje “y”. Por otra parte, como el momento de una fuerza dada debe ser perpendicular a dicha fuerza, el momento con respecto a “O” de cada una de las fuerzas del sistema y, por consiguiente, el momento resultante “MRO” estará en el plano “zx”. De esta forma el sistema fuerza-par en “O” está constituido por una fuerza “R” y un vector de par “MRO” mutuamente perpendiculares (ver siguiente figura “b”). Estas fuerzas se pueden reducir a una sola fuerza “R” (ver siguiente figura “c”) o, si R = 0, a un solo par cuyo momento sea igual a “MRO” En la práctica, el sistema fuerza-par en “O” está caracterizado por las componentes:
|



|
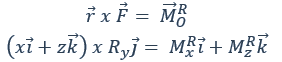
La reducción del sistema a una sola fuerza puede efectuar se moviendo “R” a un nuevo punto de aplicación “A” (x, 0, z) seleccionado de manera que el momento de “R” con respecto a “O” sea igual a “MRO” el cual se escribe:
Al calcular los productos vectoriales e igualar los coeficientes de los vectores unitarios correspondientes en ambos miembros de la ecuación se obtienen dos ecuaciones escalares que definen las coordenadas de “A”:
Estas ecuaciones expresan que los momentos de “R” con respecto a los ejes “x” y “z” deben ser iguales a
|



| REDUCCIėN DE UN SISTEMA DE FUERZAS A UNA LLAVE DE TORSION O TORSOR |
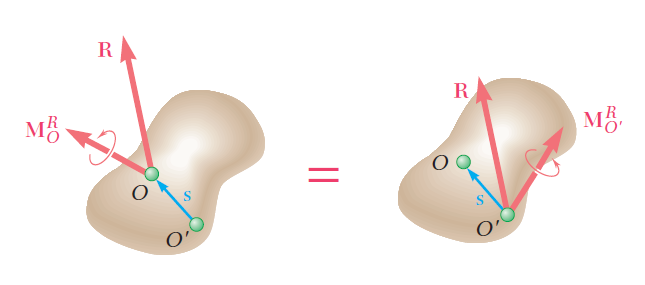
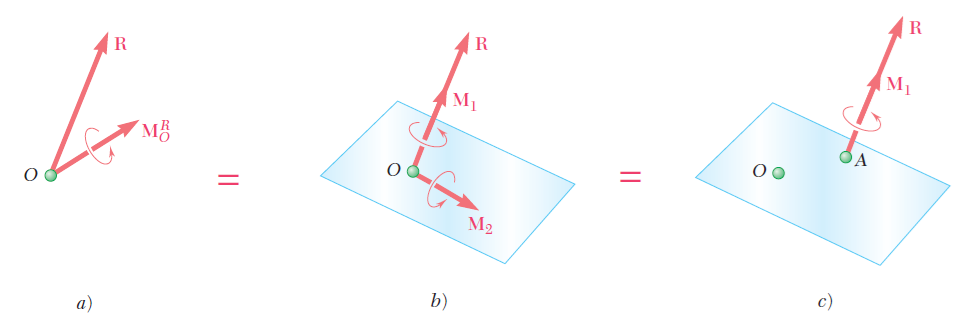
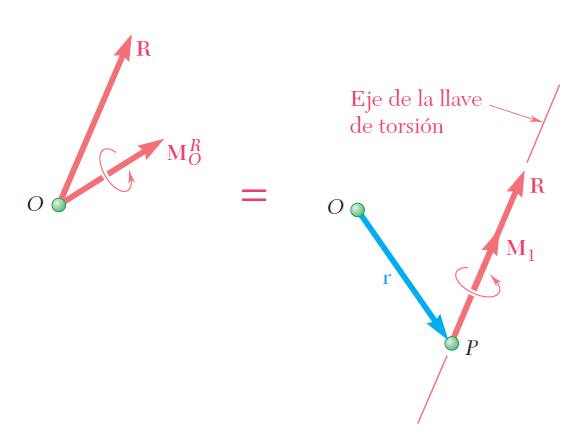
En el caso general de un sistema de fuerzas en el espacio, el sistema equivalente fuerza-par en “O” consta de una fuerza “R” y un vector de par “MRO”, ambos distintos de cero, que no son perpendiculares entre sí (ver siguiente figura “a”). Por tanto, el sistema de fuerzas no puede ser reducido a una sola fuerza o a un solo par. Sin embargo, el vector de par puede ser reemplazado por otros dos vectores de par obtenidos al descomponer “MRO” en una componente “M1” a lo largo de “R” y una componente “M2” en un plano perpendicular a “R” (ver siguiente figura “b”). Entonces, el vector de par “M2” y la fuerza “R” pueden reemplazarse por una sola fuerza “R” que actúa a lo largo de una nueva línea de acción. Por tanto, el sistema original de fuerzas se reduce a “R” y al par vector “M1” (ver siguiente “c”); de esta forma, el sistema se reduce a “R” y un par que actúa en el plano perpendicular a “R”. A este sistema fuerza-par, en particular, se le conoce como llave de torsión debido a que la combinación resultante de empuje y torsión es la misma que produciría una llave de torsión real. A la línea de acción de “R” se le conoce como eje de la llave de torsión y a la razón p = M1/R se le denomina paso de la llave de torsión. Por consiguiente, una llave de torsión está constituida por dos vectores colineales, específicamente, una fuerza “R” y un vector de par.
|

|
Hay que recordar de la expresión anterior, obtenida en la sección pasada para la proyección de un vector sobre la línea de acción de otro vector, se observa que la proyección de “MRO” sobre la línea de acción de “R” es igual a:
Por tanto, el paso de una llave de torsión puede ser expresado como:
Para de finir el eje de una llave de torsión se puede escribir una relación que involucre al vector de posición “r” de un punto arbitrario “P” localizado sobre dicho eje. Fijando la fuerza resultante “R” y el vector de par “M1” en “P” (ver siguiente figura) y expresando que el momento con respecto a “O” de este sistema fuerza-par, es igual al momento resultante “MRO” del sistema original de fuerzas, se escribe:
o, de acuerdo con la ecuación anterior:
|


|
Para comprender mejor este tema, cuando la resultante es una fuerza; puedes ver el ejemplo |
Para comprender mejor este tema, cuando la resultante es una llave de torsi¾n; puedes ver el ejemplo |
| G. 03 | S.M. |
Trabajo de Fin de Lexia | |
Trabajo de Fin de lexia |