


|
En esta unidad se determinará el momento de inercia; por el método de tablas, como también por el método de integración; para áreas planas. El radio de giro de un área. El teorema de los ejes paralelos. El momento de inercia de áreas compuestas y el producto de inercia. |
| INTRODUCCIÓN |
Anteriormente se analizaron varios sistemas de fuerzas que estaban distribuidas sobre un área o volumen. Los tres tipos principales de fuerzas que se consideraron fueron:1) los pesos de placas homogéneas de espesor uniforme, 2) las cargas distribuidas que actúan sobre vigas y las fuerzas hidrostáticas y 3) los pesos de cuerpos tridimensionales homogéneos. En el caso de placas homogéneas, la magnitud ΔW del peso de un elemento de una placa fue proporcional al área ΔA de dicho elemento. Para las cargas distribuidas que actuaban sobre vigas, la magnitud ΔW de cada peso elemental fue representado con un elemento de área ΔA=ΔW bajo la curva de carga; por otra parte, en el caso de fuerzas hidrostáticas que actuaban sobre superficies rectangulares sumergidas, se siguió un procedimiento similar. En el caso de cuerpos tridimensionales homogéneos, la magnitud ΔW del peso de un elemento del cuerpo era proporcional al volumen ΔV de dicho elemento. Por tanto, en todos los casos que se consideraron anteriormente, las fuerzas distribuidas eran proporcionales a las áreas o a los volúmenes elementales asociados con éstas. Por consiguiente, la resultante de dichas fuerzas se podía obtener con la suma de las áreas o los volúmenes correspondientes y el momento de la resultante con respecto a cualquier eje dado se podía determinar al calcular los primeros momentos de las áreas o de los volúmenes con respecto a dicho eje. En la primera parte de esta lexía se estudian fuerzas distribuidas ΔF cuyas magnitudes no sólo dependen de los elementos de área ΔA sobre los cuales actúan éstas, sino que también dependen de la distancia que hay desde ΔA hasta algún eje dado. En forma más precisa, se supone que la magnitud de la fuerza por unidad de área ΔF/ΔA varía linealmente con la distancia al eje bajo consideración. Las fuerzas de este tipo se presentan en el estudio de la flexión de vigas y en problemas que involucran superficies sumergidas que no son rectangulares. Si las fuerzas elementales involucradas están distribuidas sobre un área A y varían linealmente con la distancia y al eje x, se demostrará que mientras que la magnitud de su resultante R depende del primer momento Qx = ʃ ydA del área A, la ubicación del punto donde se aplica R depende del segundo momento, o momento de inercia, Ix=ʃ y2dA de la misma área con respecto al eje “x”. Se aprenderá a calcular los momentos de inercia de di versas áreas con respecto a ejes “x” y “y” dados. Además, en la primera parte de esta lexía se introduce el momento polar de inercia Jo = ʃ r2dA de un área, donde “r” es la distancia desde el elemento de área dA hasta el punto O. Para facilitar los cálculos, se establecerá una relación entre el momento de inercia Ix de un área A con respecto a un eje x dado y el momento de inercia Ix’ de la misma área con respecto al eje centroidal paralelo x’ (teorema de los ejes paralelos). También se estudiará la transformación de los momentos de inercia de un área dada cuando se rotan los ejes coordenados. |
Momento de inercia de un área Segundo momento, o momento de inercia, de un área. En la primera parte de esta lexía se estudian fuerzas distribuidas ΔF cuyas magnitudes ΔF son proporcionales a los elementos de área ΔA sobre los cuales actúan dichas fuerzas y que, al mismo tiempo, varían linealmente con la distancia que hay desde ΔA hasta un eje dado. Por ejemplo, considérese una viga de sección transversal uniforme, la cual está sometida a dos pares iguales y opuestos que están aplicados en cada uno de los extremos de la viga. | 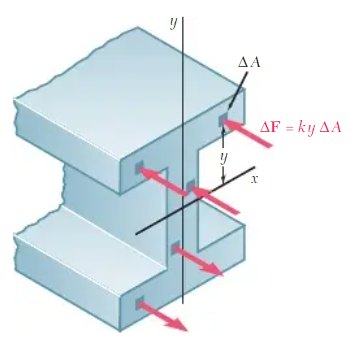
|
Se dice que una viga en estas condiciones está en flexión pura y en la mecánica de materiales se demuestra que las fuerzas internas en cualquier sección de la viga son fuerzas distribuidas cuyas magnitudes ΔF=kyΔA varían linealmente con la distancia y que hay entre el elemento de área ΔA y un eje que pasa a través del centroide de la sección. Dicho eje, representado por el eje x que se muestra en la figura, se conoce como el eje neutro de la sección. Las fuerzas en un lado del eje neutro son fuerzas de compresión, mientras que las fuerzas en el otro lado son fuerzas de tensión; sobre el propio eje neutro las fuerzas son iguales a cero. La magnitud de la resultante R de las fuerzas elementales ΔF que actúan sobre toda la sección es
La última integral obtenida se conoce el primer momento Qx de la sección con respecto al eje x; ésta es igual a |


La magnitud M de dicho par (momento flector) debe ser igual a la suma de los momentos ΔMx = yΔF = ky2ΔA de las fuerzas elementales. Al integrar sobre toda la sección se obtiene
La última integral se conoce como el segundo momento, o momento de inercia, de la sección de la viga con respecto al eje “x” y se representa con Ix. | 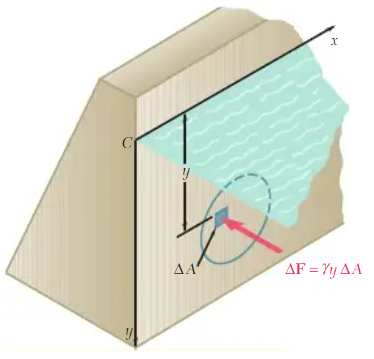
|

Éste se obtiene con la multiplicación de cada elemento de área dA por el cuadrado de su distancia desde el eje “x” e integrándolo sobre la sección de la viga. Como cada producto y2dA es positivo, sin importar el signo de “y” o cero (si “y” es cero), la integral Ix siempre será positiva. Otro ejemplo de un segundo momento o momento de inercia de un área lo proporciona el siguiente problema de hidrostática: una compuerta circular vertical utilizada para cerrar el escurridero de un depósito grande está sumergida bajo el agua, como se muestra en la figura anterior. Si la compuerta fuera rectangular, la resultante de las fuerzas depresión se podría determinar a partir de la curva de presión. Sin embargo, puesto que la compuerta es circular, se debe utilizar un método más general. Representando con y la profundidad de un elemento de área ΔA y con γ el peso específıco del agua, la presión en el elemento es p = ᵞy, y la magnitud de la fuerza elemental ejercida sobre ΔA es ΔF=pΔA= ᵞyΔA. Por tanto, la magnitud de la resultante de las fuerzas elementales es
y se puede obtener calculando el primer momento Qx = ʃydA del área de la compuerta con respecto al eje x. El momento Mx de la resultante debe ser igual a la suma de los momentos ΔMx=y ΔF=γy2ΔA de las fuerzas elementales. Al integrar sobre el área de la compuerta, se tiene que
Aquí la integral obtenida representa el segundo momento o momento de inercia Ix del área con respecto al eje x. |


| DETERMINACIÓN DEL MOMENTO DE INERCIA DE UN ÁREA, POR EL MÉTODO DE INTEGRACIÓN |
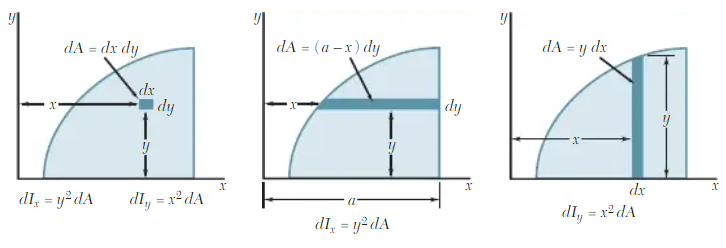
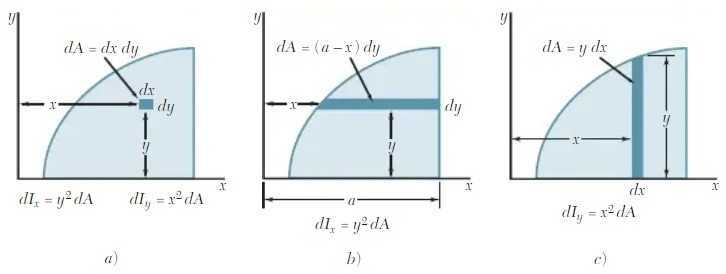
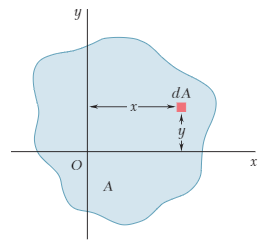
En la sección anterior se definió el segundo momento o momento de inercia de un área A con respecto al eje x. Definiendo de forma similar el momento de inercia Iy del área A con respecto al eje y, se escribe (ver siguiente figura a).
Estas integrales, conocidas como los momentos rectangulares de inercia del área A, se pueden evaluar con facilidad si se selecciona a dA como una tira delgada paralela a uno de los ejes coordenados. Para calcular Ix, la tira se selecciona paralela al eje x, de manera que todos los puntos de dicha tira estén a la misma distancia y del eje x (ver siguiente figura b); entonces, se obtiene el momento de inercia dIx de la tira multiplicando su área dA por y2. Para calcular Iy, la tira se selecciona paralela al eje y de forma que todos los puntos de dicha tira estén a la misma distancia x del eje y (ver siguiente figura c); así, el momento de inercia dIy de la tira es x2 dA. |

|
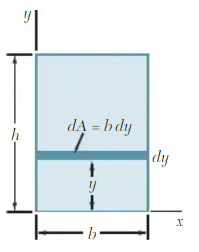
Momento de inercia de un área rectangular. Como un ejemplo, se procederá a determinar el momento de inercia de un rectángulo con respecto a su base. Dividiendo el rectángulo en tiras paralelas al eje x, se obtiene
| 
|


Cálculo de Ix e Iy con el uso de las mismas tiras elementales. La fórmula que se acaba de derivar se puede utilizar para determinar el momento de inercia dIx con respecto al eje x de una tira rectangular que es paralela al eje y, como la tira mostrada en la siguiente figura. Estableciendo b = dx y h = y, se escribe:
|

Por otra parte, se tiene que:
Por tanto, se puede utilizar el mismo elemento para calcular los momentos de inercia Ix e Iy de un área dada. | 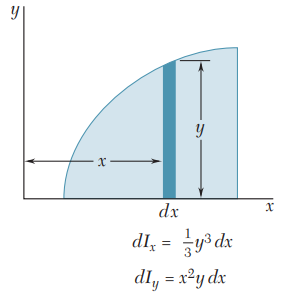
|

| MOMENTO POLAR DE INERCIA |
Una integral muy importante en los problemas relacionados con la torsión de flechas cilíndricas y en los problemas relacionados con la rotación de placas es la siguiente
donde r es la distancia desde O hasta el área elemental dA. Esta integral es el momento polar de inercia del área A con respecto al “polo” O. | 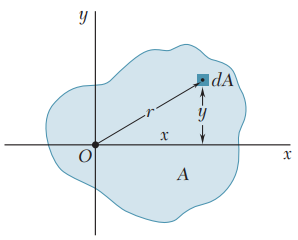
|

El momento polar de inercia de un área dada puede calcularse a partir de los momentos rectangulares de inercia Ix e Iy del área, si dichas cantidades ya son conocidas. De hecho, si se observa que r2 = x2 + y2, se puede escribir:
Esto es
|


| RADIO DE GIRO DE UN ÁREA |
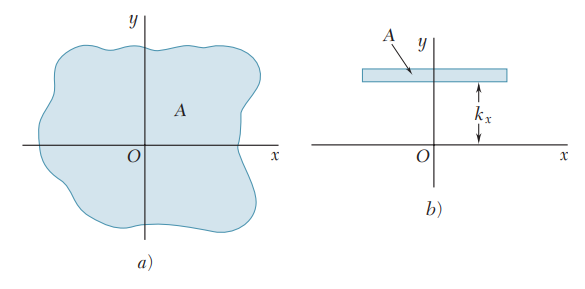
Considere un área A que tiene un momento de inercia Ix con respecto al eje x (ver figura a). Imagine que se ha con centrado esta área en una tira delgada paralela al eje x (ver figura b). Si el área A, con centrada de esta forma, debe tener el mismo momento de inercia con respecto al eje x, la tira debe ser colocada a una distancia kx desde el eje x, donde kx está definida por la relación
Al resolver para kx, se escribe:
|
|


Se hace referencia a la distancia kx como el radio de giro del área con respecto al eje x. En forma similar, se pueden definir los radios de giro ky y kO (figura c y d); así se escribe:
Si se reescribe la ecuación en términos de los radios de giro, se encuentra que
| 
|



|
Ejemplo 7.1 |
 Click aquí
Click aquí Ejemplo 7.2 |
Ejemplo 7.3 |
| TEOREMA DE LOS EJES PARALELOS |
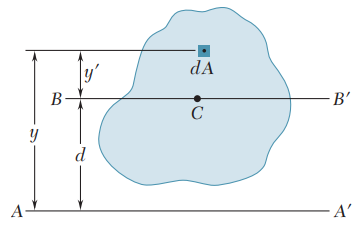
Considere el momento de inercia I de un área A con respecto a un eje AA’. Si se representa con y la distancia desde un elemento de área dA hasta AA’, se escribe
|

Ahora, se dibuja a través del centroide C del área un eje BB’ que es paralelo a AA’, dicho eje es llamado eje centroidal. Representando con y' la distancia desde el elemento dA hasta BB’, se escribe y=y’+d, donde d es la distancia entre los ejes AA’ y BB’. Sustituyendo por y en la integral anterior, se escribe
| 
|


La primera integral representa el momento de inercia Ī del área con respecto al eje centroidal BB’. La segunda integral representa el primer momento del área con respecto a BB’; como el centroide C del área está localizado sobre dicho eje, la segunda integral debe ser igual a cero. Finalmente, se observa que la última integral es igual al área total A. Por tanto, se tiene:
Esta fórmula expresa que el momento de inercia I de un área con respecto a cualquier eje dado AA’ es igual al momento de inercia Ī del área con respecto a un eje centroidal BB’ que es paralelo a AA’ más el producto del área A y el cuadrado de la distancia d entre los dos ejes. Este teorema se conoce como el teorema de los ejes paralelos o teorema de Steiner. Sustituyendo k2A por I y k2A por Ī, el teorema también se puede expresar de la siguiente forma:
Se puede utilizar un teorema similar para relacionar el momento polar de inercia Jo de un área, con respecto a un punto O, con el momento polar de inercia
|




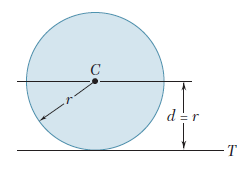
Ejemplo 1. Como una aplicación del teorema de los ejes paralelos, se procederá a determinar el momento de inercia IT de un área circular con respecto a una línea tangente al círculo (ver siguiente figura). En los ejemplos anteriores, se encontró que el momento de inercia de un área circular con respecto a un eje centroidal es:
Por tanto se pue de escribir:
| 
|


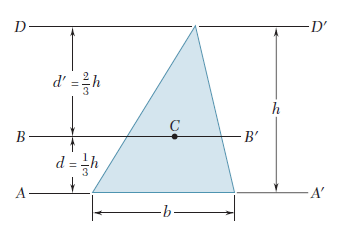
Ejemplo 2. El teorema de los ejes paralelos también se puede utilizar para determinar el momento centroidal de inercia de un área cuando se conoce el momento de inercia del área con respecto a un eje paralelo. Por ejemplo, considere un área triangular (ver figura). En el problema resuelto anterior, se encontró que el momento de inercia del triángulo con respecto a su base AA’ es igual a:
Con el teorema de los ejes paralelos, se escribe:
| 
|



Es necesario resaltar que el producto Ad2 fue restado del momento de inercia dado, con el fin de obtener el momento centroidal de inercia del triángulo. Observe que dicho producto se suma cuando se pasa de un eje centroidal a un eje paralelo, pero debe restarse cuando se pasa a un eje centroidal. En otras palabras, el momento de inercia de un área siempre es menor en relación con un eje centroidal que con respecto a cualquier otro eje paralelo. En el ejemplo 2, se observa que el momento de inercia del triángulo con respecto a la línea DD’ (la cual se ha dibujado a través de un vértice del triángulo) se puede obtener escribiendo:
Observe que IDD’ no se habría podido obtener directamente a partir de IAA’. El teorema de los ejes paralelos sólo se puede aplicar si uno de los dos ejes paralelos pasa a través del centroide del área. |

| MOMENTO DE INERCIA DE ÁREAS COMPUESTAS |
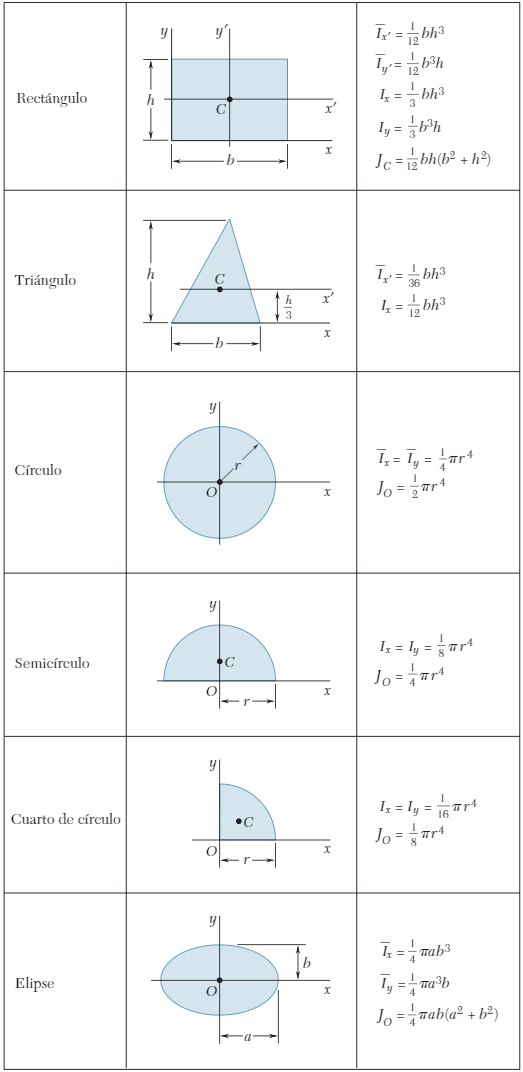
Un área compuesta A que está constituida por varias áreas componentes A1, A2, A3, ... Como la integral que representa el momento de inercia de A puede subdividirse en integrales evaluadas sobre A1, A2, A3, ..., el momento de inercia de A con respecto a un eje dado se obtiene sumando los momentos de las áreas A1, A2, A3, ... con respecto al mismo eje. Por tanto, el momento de inercia de un área que consta de varias de las formas comunes mostradas en la siguiente figura, se puede obtener con las fórmulas proporcionadas en dicha figura. Sin embargo, antes de sumar los momentos de inercia de las áreas componentes, es posible que se tenga que utilizar el teorema de los ejes paralelos para pasar cada momento de inercia al eje deseado. En las siguientes tablas se proporcionan las propiedades de las secciones transversales de varias formas (o perfiles) estructurales. Como se señaló anteriormente, el momento de inercia de una sección de una viga con respecto a su eje neutro está relacionado con el cálculo del momento flector en esa sección de la viga. Por tanto, la determinación de los momentos de inercia es un prerrequisito para el análisis y el diseño de elementos estructurales. Es necesario señalar que el radio de giro de un área compuesta no es igual a la suma de los radios de giro de las áreas componentes. Para determinar el radio de giro de un área compuesta, es necesario que primero se calcule el momento de inercia del área. |
|
| PRODUCTO DE INERCIA |
La integral que se obtiene al multiplicar a cada elemento dA de un área A por sus coordenadas “x” y “y”, e integrando sobre toda el área, es conocida como el producto de inercia del área A respecto a los ejes “x” y “y”. A diferencia de los momentos de inercia Ix e Iy, el producto de inercia Ixy puede ser positivo, negativo o cero.
| 
|

Cuando uno o ambos ejes “x” y “y” son ejes de simetría del área A, el producto de inercia Ixy es igual a cero. Por ejemplo, considérese la sección en forma de canal que muestra la figura. Puesto que esta sección es simétrica respecto al eje x, con cada elemento dA de coordenadas “x” y “y” se puede asociar un elemento dA’ de coordenadas “x” y “-y”. Desde luego, las contribuciones a Ixy de cualquier par de elementos seleccionados de esta forma se cancela y, por tanto, la integral se reduce a cero. | 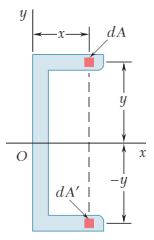
|
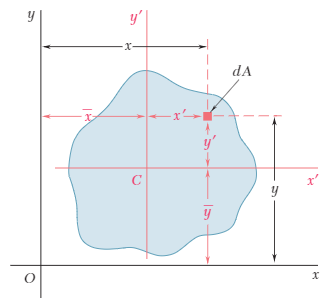
| Para los productos de inercia, es posible derivar un teorema de ejes paralelos similar al establecido en el tema anterior para momentos de inercia. Considere un área A y un sistema de coordenadas rectangulares “x” y “y”. A través del centroide C del área, cuyas coordenadas son x’ y y’, se dibujan dos ejes centroidales x’ y y’ que son paralelos, respectivamente, a los ejes “x” y “y”. |
Representando con “x” y “y” las coordenadas de un elemento de área dA con respecto a los ejes originales y con x’ y y’ las coordenadas del mismo elemento con respecto a los ejes centroidales, se escribe
La primera integral representa el producto de inercia Īx’y’ del área A con respecto a los ejes centroidales x’ y y’. Las dos integrales siguientes representan los primeros momentos del área con respecto a los ejes centroidales; dichas integrales se reducen a cero puesto que el centroide C está localizado sobre esos ejes. La última integral es igual al área total A. Por tanto, se tiene que:
Para efectos de comprender mejor este tema, puedes ver el ejemplo 7.4, ejemplo 7.5 y el ejemplo 7.6 |





Ejemplo 7.4 |
Ejemplo 7.5 |
Ejemplo 7.6 |
| G. 01 |  S.M. S.M. |
Trabajo de Fin de Lexia | |
ACTIVIDAD FIN DE LA LEXIA |