


| 03 EQUILIBRIO DE CUERPOS RÍGIDOS |
|
Cuando un cuerpo rígido soporta un sistema de fuerzas en equilibrio, es importante el poder determinar estas condiciones, los diferentes vínculos o conexiones que soporta al cuerpo rígido. las reacciones que generan estos tipos de vínculos: simples apoyos, apoyo fijos o empotramientos, entre otros. |
| INTRODUCCIÓN |
En la lexía anterior se vio que las fuerzas externas que actúan sobre un cuerpo rígido pueden reducirse a un sistema fuerza-par en un punto arbitrario O. Cuando la fuerza y el par son iguales a cero, las fuerzas externas forman un sistema equivalente a cero y se dice que el cuerpo rígido se encuentra en equilibrio. Por tanto, las condiciones necesarias y suficientes para el equilibrio de un cuerpo rígido se pueden obtener igualando a cero a R Y MOR.
Si se descompone cada fuerza y cada momento en sus componentes rectangulares, se pueden expresar las condiciones necesarias y suficientes para el equilibrio de un cuerpo rígido por medio de las seis ecuaciones escalares que se presentan a continuación:
Las ecuaciones obtenidas se pueden emplear para determinar fuerzas desconocidas que están aplicadas sobre el cuerpo rígido o reacciones desconocidas ejercidas sobre éste por sus puntos de apoyo. Se observa que las ecuaciones expresan el hecho de que las componentes de las fuerzas externas en las direcciones “x”, “y”, y “z” están en equilibrio; las ecuaciones expresan a su vez que los momentos de las fuerzas externas con respecto a los ejes “x”, “y”, y “z” también están en equilibrio. Por tanto, para un cuerpo rígido en equilibrio el sistema de fuerzas externas no le impartirá un movimiento traslacional o rotacional al cuerpo en consideración. Para poder escribir las ecuaciones de equilibrio para un cuerpo rígido, es esencial identificar primero todas las fuerzas que actúan sobre dicho cuerpo y, entonces, dibujar el diagrama de cuerpo libre correspondiente. En esta lexía se estudiará el equilibrio de estructuras bidimensionales sujetas a fuerzas contenidas en sus planos y se aprenderá cómo dibujar sus diagramas de cuerpo libre. Además de las fuerzas aplicadas sobre una estructura, se considerarán las reacciones ejercidas sobre esta últimas por sus puntos de apoyo. Se aprenderá cómo determinar si una estructura está apoyada apropiadamente, de forma que se pueda saber de antemano si las ecuaciones de equilibrio podrán resolverse para determinar las fuerzas y reacciones determinadas.
|



| DIAGRAMAS DE CUERPO LIBRE. |
Al resolver un problema relacionado con el equilibrio de un cuerpo rígido es esencial que se consideren todas las fuerzas que actúan sobre éste; además, es importante excluir cualquier fuerza que no está dada directamente sobre dicho cuerpo. Omitir o agregar una fuerza extraña podría destruir las condiciones de equilibrio. Por tanto, el primer paso en la solución del problema es esquematizar un diagrama de cuerpo libre del cuerpo rígido en consideración. Los diagramas de cuerpo libre ya fueron utilizados en muchas ocasiones en el capítulo anterior. Sin embargo, en vista de su importancia para la solución de problemas de equilibrio, aquí se resumen los diferentes pasos que se deben seguir al momento de dibujar un diagrama de cuerpo libre. 1. Se debe tomar una decisión acertada en relación con la selección del cuerpo libre que será utilizado. Después se debe separar al cuerpo del suelo y de todos los demás cuerpos. Así, se realiza un croquis del contorno del cuerpo ya aislado. 2. Todas las fuerzas externas deben indicarse en el diagrama de cuerpo libre. Estas fuerzas representan las acciones ejercidas sobre el cuerpo libre por el suelo y por los cuerpos que han sido separados del mismo; estas fuerzas deben aplicarse en los diversos puntos sobre los que el cuerpo libre estaba apoyado en el suelo o estaba conectado a otros cuerpos. También se debe incluir entre las fuerzas externas el peso del cuerpo libre, puesto que representa la atracción ejercida por la Tierra sobre las distintas partículas que lo constituyen. Como se verá en la siguiente lexía, el peso debe aplicarse en el centro de gravedad del cuerpo. Cuando el cuerpo libre está constituido por varios partes, las fuerzas que dichas partes ejercen entre sí no deben incluirse entre las fuerzas externas; siempre que se considere completo al cuerpo libre, son fuerzas internas. 3. Las magnitudes y las direcciones de las fuerzas externas que son conocidas deben señalarse con claridad en el diagrama de cuerpo libre. Cuando se indiquen las direcciones de dichas fuerzas, se debe recordar que éstas son las ejercida sobre, y no por, el cuerpo libre. Por lo general, las fuerzas externas conocidas incluyen el peso del cuerpo libre y las fuerzas aplicadas con un propósito en particular. 4. Las fuerzas externas desconocidas consisten en las reacciones a través de las cuales el suelo y otros cuerpos se oponen a un posible movimiento del cuerpo libre. Las reacciones lo obligan a permanecer en la misma posición y, por esta razón, algunas veces reciben el nombre de fuerzas de restricción. Las reacciones se ejercen en los puntos donde el cuerpo libre está apoyado o conectado a otros cuerpos y deben indicarse con claridad. 5. El diagrama de cuerpo libre también debe incluir dimensiones, puesto que éstas se pueden necesitar para el cálculo de momentos de fuerzas. Sin embargo, cualquier otro detalle debe omitirse. |
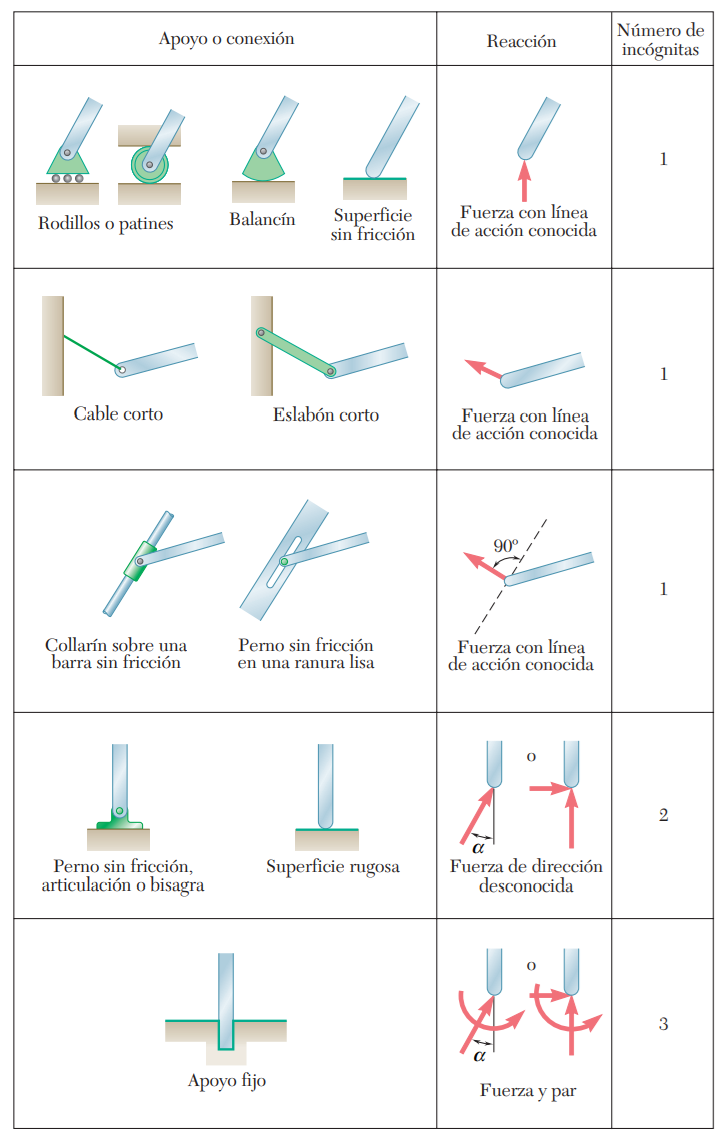
| REACCIONES EN LOS PUNTOS DE APOYOS Y CONEXIONES EN UNA ESTRUCTURA BIDIMENSIONAL. |
En la primera parte de esta lexía se considera el equilibrio de una estructura bidimensional, esto es, se supone que la estructura que se está analizando y las fuerzas aplicadas sobre la misma están contenidas en el mismo plano. De la forma más clara, las reacciones necesarias para mantener a la estructura en la misma posición también estarán contenidas en el mismo plano. Las reacciones ejercidas sobre una estructura bidimensional pueden ser divididas en tres grupos que corresponden a tres tipos de apoyos (puntos de apoyo) o conexiones: 1. Reacciones equivalentes a una fuerza con una línea de acción conocida. Los apoyos y las conexiones que originan reacciones de este tipo incluyen rodillos, balancines, superficies sin fricción, eslabones o bielas y cables cortos, collarines sobre barras sin fricción y pernos sin fricción en ranuras lisas. Cada uno de estos apoyos y conexiones pueden impedir el movimiento sólo en una dirección. Cada una de estas reacciones involucra a una sola incógnita, es decir, la magnitud de la reacción; dicha magnitud debe representarse con una letra apropiada. La línea de acción de la reacción es conocida y debe indicarse con claridad en el diagrama de cuerpo libre. La dirección de la reacción debe ser de la siguiente manera, para los casos de una superficie sin fricción (hacia el cuerpo libre) o de un cable (alejándose del cuerpo libre). La reacción puede estar dirigida en uno u otro sentido en el caso de rodillos de doble carril, eslabones, collarines sobre barras y pernos en ranuras. Por lo general, los rodillos de un carril y los balancines son reversibles y, por tanto, las reacciones correspondientes también pueden estar dirigidas en uno u otro sentido. 2. Reacciones equivalentes a una fuerza de magnitud y dirección desconocidas. Los apoyos y las conexiones que originan reacciones de este tipo incluyen pernos sin fricción en orificios ajustados, articulaciones o bisagras y superficies rugosas. Éstos pueden impedir la traslación del cuerpo rígido en todas las direcciones, pero no pueden impedir la rotación del mismo con respecto a la conexión. Las reacciones de este grupo involucran dos incógnitas que usualmente se representan por sus componentes “x” y, “y”. En el caso de una superficie rugosa, la componente perpendicular a la superficie debe dirigirse alejándose de ésta. |
|
3. Reacciones equivalentes a una fuerza y un par. Estas reacciones se originan por apoyos fijos, los cuales se oponen a cualquier movimiento del cuerpo libre y, por tanto, lo restringen por completo. Los soportes fijos producen fuerzas sobre toda la superficie de contacto; sin embargo, estas fuerzas forman un sistema que se puede reducir a una fuerza y un par. Las reacciones de este grupo involucran tres incógnitas, las cuales consisten en las dos componentes de la fuerza y en el momento del par.
Cuando la dirección de una fuerza o un par desconocido no es evidente, no se debe intentar determinarlo. En lugar de ello, se supondrá arbitrariamente el sentido de la fuerza o el par; el signo de la suposición obtenida indicará si la respuesta fue correcta o no. |
| EQUILIBRIO DE UN CUERPO RÍGIDO BIDIMENSIONAL. |
Las condiciones establecidas en el primer tema para el equilibrio de un cuerpo rígido se vuelven más simples para casos de estructuras bidimensionales. Al seleccionar a los ejes “x” y, “y” en el plano de la estructura, se tienen las siguientes condiciones para cada una de las fuerzas aplicadas sobre la estructura.
Por tanto, las seis ecuaciones de equilibrio derivadas en el primer tema se reducen de la siguiente forma, y a las tres identidades triviales 0=0.
Como se debe cumplir que ΣMO=0 sin importar la elección del origen O, se pueden escribir las ecuaciones de equilibrio para una estructura bidimensional en la forma más general donde “A” es cualquier punto en el plano de la estructura.
Las tres ecuaciones obtenidas pueden resolverse para un máximo de tres incógnitas. En la sección anterior se vio que las fuerzas desconocidas incluyen reacciones y que el número de incógnitas correspondientes a una reacción. Como se hizo referencia en el tema anterior, se observa que las ecuaciones de equilibrio pueden ser empleadas para determinar las reacciones asociadas con dos rodillos y un cable, un apoyo fijo o un rodillo y un perno en un orificio ajustado, etcétera. |



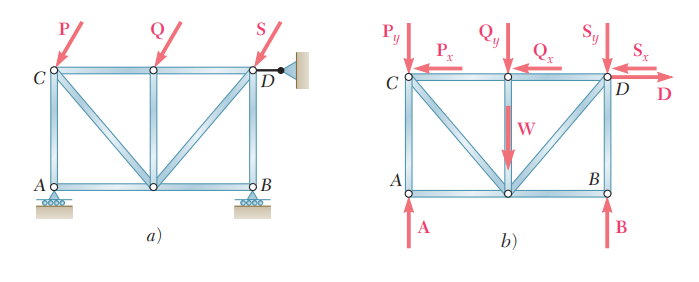
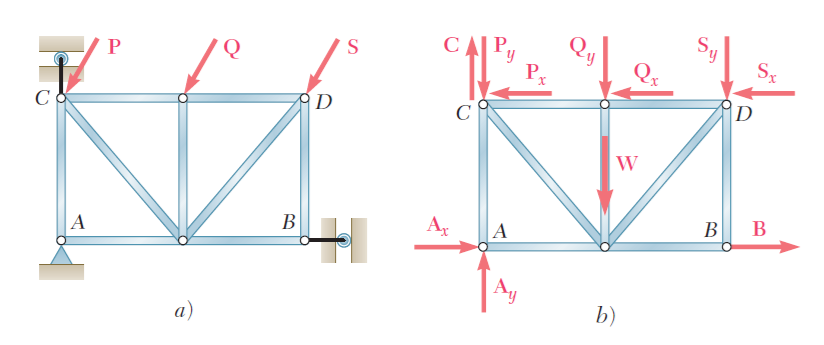
Observe la siguiente figura “a”, en la cual la armadura mostrada está sometida a las fuerzas dadas P, Q y S. La armadura se mantiene en su lugar por medio de un perno en A y un rodillo en B. El perno impide que el punto A se mueva ejerciendo una fuerza sobre la armadura que se puede descomponer en las componentes Ax y Ay; por su parte, el rodillo impide que la armadura rote con respecto a A ejerciendo la fuerza vertical B. | 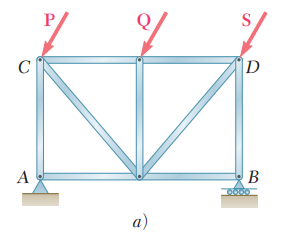
|
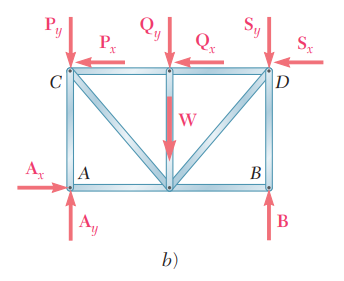
| El diagrama de cuerpo libre de la armadura se muestra en la figura “b”; éste incluye tanto las reacciones Ax, Ay y B como las fuerzas aplicadas P, Q y S y el peso W de la armadura. Para expresar que la suma de los momentos con respecto a A, que implica todas las fuerzas mostradas en la figura b, es igual a cero, se escribe la ecuación ΣMA=0, la cual puede utilizarse para determinar la magnitud B puesto que dicha ecuación no contiene Ax o a Ay. |
Después, para indicar que la suma de las componentes “x” y, “y” de las fuerzas son iguales a cero, se escriben las ecuaciones ΣFx=0 y ΣFy=0, a partir de las cuales se obtienen, respectivamente, las componentes Ax y Ay. Se podría obtener una ecuación adicional expresando que la suma de momentos de las fuerzas externas con respecto a un punto distinto de A es igual a cero. Por ejemplo, se podría escribir ΣMB=0. Sin embargo, una expresión de ese tipo no contendría ninguna información nueva, puesto que ya se ha establecido que el sistema de fuerzas mostrado en la figura b es equivalente a cero. Por tanto, la ecuación adicional no sería independiente y no podría utilizarse para determinar una cuarta incógnita. Sin embargo, esta ecuación serviría para verificar la solución obtenida a partir de las tres ecuaciones de equilibrio originales. A pesar de que no se pueden poner ecuaciones adicionales a las tres ecuaciones de equilibrio originales, cualquier de éstas puede ser reemplazada por otra. De esta forma, un sistema alternativo de ecuaciones de equilibrio es
Donde el segundo punto con respecto al cual se suman los momentos (en este caso, el punto B) no puede estar ubicado en la línea paralela al eje y que pasa a través del punto A (figura b). Estas ecuaciones son condiciones suficientes para el equilibrio de la armadura. Las primeras dos ecuaciones indican que las fuerzas externas deben reducirse a una sola fuerza vertical en A. Como la tercera ecuación requiere que el momento de esta fuerza sea igual a cero con respecto al punto B, el cual no está sobre su línea de acción, la fuerza debe ser igual a cero y el cuerpo rígido está en equilibro. Un tercer posible conjunto de ecuaciones de equilibrio es de la siguiente forma, donde los puntos A, B y C no son colineales.
La primera ecuación requiere que las fuerzas externas se reduzcan a una sola fuerza en A; la segunda ecuación requiere que esta fuerza pase a través de B y la tercera ecuación requiere que esta fuerza pase a través de B y la tercera ecuación requiere que pase a través de C. Como los puntos A, B y C no son colineales, la fuerza debe sería igual a cero y el cuerpo rígido está en equilibrio. |


|
La ecuación ΣMA=0, la cual expresa que la suma de los momentos de las fuerzas con respecto al perno A es igual a cero, posee un significado físico más definido que cualquiera de las otras dos ecuaciones. Éstas expresan una idea similar de balance, pero lo hacen con respecto a puntos en los cuales el cuerpo rígido no está realmente articulado. Sin embargo, dichas ecuaciones son tan útiles como la primera y la selección de las ecuaciones de equilibrio no debe estar indebidamente influida por el significado físico de las mismas. De hecho, en la práctica será deseable elegir ecuaciones de equilibrio que contengan una sola incógnita, puesto que así se elimina la necesidad de resolver ecuaciones simultáneas. Es posible obtener ecuaciones de una sola incógnita al sumar momentos con respecto al punto de intersección de las líneas de acción de dos fuerzas desconocidas o, si dichas fuerzas son paralelas, sumar las componentes perpendiculares a esa dirección común. Por ejemplo, en la siguiente figura, en la cual la armadura mostrada se sostiene por rodillos en A y B y por un eslabón corto en D, las reacciones en A y B pueden eliminarse con la suma de las componentes x. Las reacciones en A y D se eliminan al sumar momentos con respecto a C, y las reacciones en B y D sumando momentos con respecto a D. Las ecuaciones obtenidas son
Cada una de estas ecuaciones contiene una sola incógnita. Para efectos de comprender mejor este tema, puedes ver el ejemplo 3.1, ejemplo 3.2, ejemplo 3.3, ejemplo 3.4 o el ejemplo 3.5 |

Ejemplo 3.1 |
 Click aquí
Click aquí Ejemplo 3.2 |
Ejemplo 3.3 |
Ejemplo 3.4 |
Ejemplo 3.5 |
| G. 01 |  S.M. S.M. |
| REACCIONES ESTÁTICAMENTE INDETERMINADAS, RESTRICCIONES PARCIALES. |
En los dos ejemplos considerados en la sección anterior, los tipos de apoyos usados fueron tales que era imposible que el cuerpo rígido se moviera bajo la acción de las cargas dadas o bajo cualquier otra condición de carga. En casos como éstos, se dice que el cuerpo rígido tiene restricción completa. También se debe recordar que las reacciones correspondientes a estos apoyos involucraban tres incógnitas, las cuales podían determinarse resolviendo las tres ecuaciones de equilibrio. Cuando se presenta una situación como ésta se dice que son reacciones estáticamente determinadas. |
|
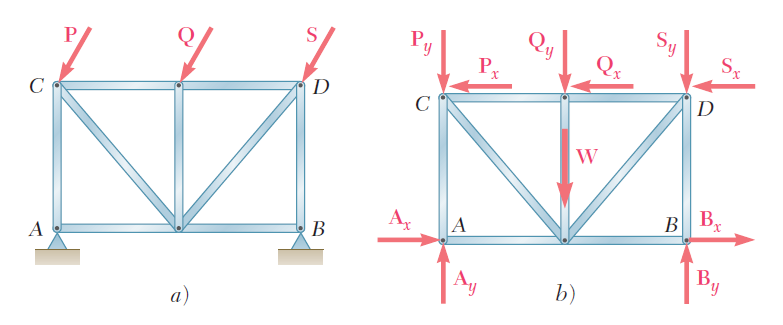
En la figura “a”, la armadura mostrada se sostiene por pernos en A y B. Estos apoyos proporcionan más restricciones de las necesarias para evitar que la armadura se mueva bajo la acción de las cargas dadas o bajo cualquier otra condición de carga. También se observa a partir del diagrama de cuerpo libre de la figura “b”, que las reacciones correspondientes involucran cuatro incógnitas. Puesto que, como se señaló en la sección anterior, sólo están disponibles tres ecuaciones; por tanto, no se pueden determinar todas las incógnitas. Mientras que las ecuaciones ΣMA=0 y ΣMB=0 proporcionan, respectivamente, las componentes verticales By y Ay, la ecuación ΣFx=0 sólo proporciona la suma Ax + Bx de las componentes horizontales de las reacciones en A y B. Se dice que las componentes Ax y Bx son estáticamente indeterminadas. Éstas pueden determinarse considerando las deformaciones ocasionadas en la armadura por la condición de carga dada, por este método está fuera del alcance de la estática y corresponde al estudio de la mecánica de materiales. |
|
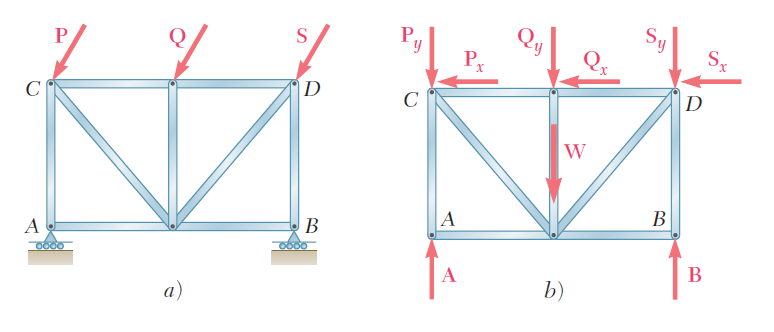
Los apoyos usados para sostener la armadura mostrada la figura “a”, consisten en los rodillos en A y B. Es evidente que las restricciones proporcionadas por estos apoyos no son suficientes para impedir que la armadura se mueva. Aunque se impide cualquier movimiento vertical, no hay nada que evite que la armadura pueda moverse en forma horizontal. Bajo estas circunstancias, se dice que la armadura tiene restricción parcial. En la figura “b” se observa que las reacciones en A y B sólo involucran dos incógnitas. Como aún se tienen que cumplir tres ecuaciones de equilibrio, hay menos incógnitas que ecuaciones y, en general, una de las ecuaciones de equilibrio no se cumplirá. Mientras que las ecuaciones ΣMA=0 y ΣMB=0 se pueden cumplir por medio de una selección apropiada de las reacciones en A y B, la ecuación ΣFx=0 no será satisfecha a menos que la suma de las componentes horizontales de las fuerzas aplicadas sea igual a cero. Por tanto, no se puede mantener el equilibrio de la armadura de la figura bajo condiciones generales de carga. De lo anterior se concluye que, si un cuerpo rígido tiene restricción completa y si las reacciones en sus apoyos son estáticamente determinadas, entonces habrá tantas incógnitas como ecuaciones de equilibrio. Cuando esta condición no se cumple, se tiene la certeza de que el cuerpo rígido no está completamente restringido o de que las reacciones en sus apoyos no son estáticamente determinadas; además, también es posible que el cuerpo rígido no esté completamente restringido y que las reacciones sean estáticamente indeterminadas. |
|
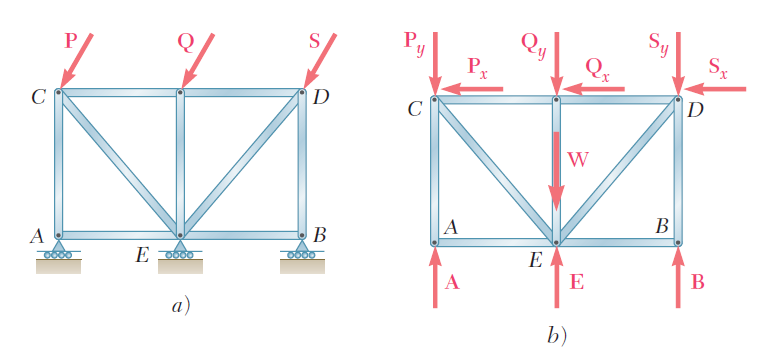
Sin embargo, se debe señalar que la condición ya mencionada, aunque es necesaria, no es suficiente. En otras palabras, el hecho de que el número de incógnitas sea igual al número de ecuaciones no garantiza que el cuerpo tenga restricción completa o que las reacciones en sus apoyos son estáticamente determinadas. Observe la figura “a”, en la cual la armadura mostrada se sostiene por medio de rodillos en A, B y E. A pesar de que existen tres reacciones desconocidas A, B y E (figura b), la ecuación ΣFx=0 no se cumplirá a menos que la suma de las componentes horizontales de las fuerzas aplicadas resulte igual a cero. Aunque hay un número suficiente de restricciones, éstas no están ubicadas de manera apropiada y no existe ningún impedimento para que la armadura se mueva horizontalmente. En este caso, se dice que la armadura está impropiamente restringida. Como sólo quedan dos ecuaciones de equilibrio para determinar tres incógnitas, las reacciones serán estáticamente indeterminadas. Por tanto, las reacciones impropias también producen indeterminación estática.
Otro ejemplo de restricciones impropias (y de indeterminación estática) lo proporciona la armadura mostrada en la siguiente figura, la cual está sostenida por un perno en A y por rodillos en B y C, que en conjunto involucran cuatro incógnitas. |
|
Como sólo se dispone de tres ecuaciones de equilibrio independientes, las reacciones en los apoyos son estáticamente indeterminadas. Por otro lado, obsérvese que no se puede cumplir la ecuación ΣMA=0 bajo condiciones generales de carga puesto que las líneas de acción de las reacciones B y C pasan a través de A. Entonces, se concluye que la armadura puede rotar alrededor de A y, por ende, está impropiamente restringida. Los ejemplos las dos figuras anteriores conducen a la conclusión de que un cuerpo rígido está impropiamente restringido siempre que los apoyos estén ubicados de tal forma que las reacciones sean concurrentes o paralelas, aunque proporcionen un número suficiente de reacciones. En resumen, para asegurarse de que un cuerpo rígido bidimensional está completamente restringido y de que las reacciones en sus apoyos son estáticamente determinadas, se debe verificar que las reacciones involucren tres (y sólo tres) incógnitas y que los apoyos estén ubicados de manera que no requieran que las reacciones sean concurrentes o paralelas. Los apoyos que involucran reacciones estáticamente indeterminadas deben utilizarse con cuidado en el diseño de estructura y con pleno conocimiento de los problemas que pueden causar. Por otra parte, es usual que el análisis de estructuras con reacciones estáticamente indeterminadas se realice en forma parcial por medio de los métodos de la estática. Por razones obvias, los apoyos que originan restricciones parciales o impropias se deben evitar en el diseño de estructuras estacionarias. Sin embargo, una estructura restringida en forma parcial o impropia no necesariamente se colapsará; bajo ciertas condiciones de carga en particular, se puede mantener el equilibrio. Además, las estructuras diseñadas para moverse sólo deben estar parcialmente restringidas. Por ejemplo, un carro de ferrocarril sería de poca utilidad si estuviera completamente restringido por tener sus frenos aplicados en forma permanente. |
| EQUILIBRIO DE UN CUERPO SUJETO A DOS FUERZAS |
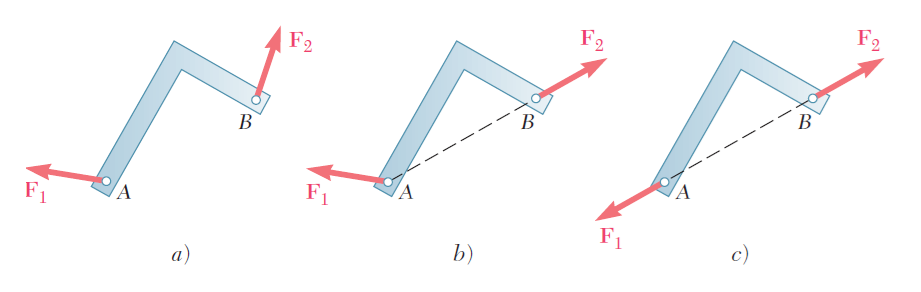
Un caso particular de equilibrio que es de considerable interés es el de un cuerpo rígido sujeto a la acción de dos fuerzas. Por lo general, un cuerpo que se encuentra en estas circunstancias recibe el nombre de cuerpo sujeto a dos fuerzas. A continuación, se demostrará que si un cuerpo sujeto a dos fuerzas está en equilibrio entonces las dos fuerzas que actúan sobre éste deben tener la misma magnitud, la misma línea de acción y direcciones opuestas. |
|
Considérese una placa en ángulo sujeta a dos fuerzas F1 y F2 que actúan, respectivamente, en A y B (ver figura “a”). Si la placa está en equilibrio, la suma de los momentos de F1 y F2 con respecto a cualquier eje debe ser igual a cero. Primero se suman momentos con respecto a A. Como, obviamente, el momento de F1 es igual a cero, el momento de F2 también debe ser igual a cero y la línea de acción de F2 debe pasar a través de A (ver fıgura “b”). En forma similar, sumando momentos con respecto a B se demuestra que la línea de acción de F1 debe pasar a través de B (ver figura “c”). Por tanto, ambas fuerzas tienen la misma línea de acción (que resulta ser la línea AB). A partir de cualquiera de las ecuaciones ΣFx=0 y ΣFy=0 se observa que las fuerzas también deben tener la misma magnitud, pero direcciones opuestas.
Si varias fuerzas actúan en dos puntos A y B, las fuerzas que actúan en A pueden ser reemplazadas por su resultante F1 y las de B pueden reemplazarse por su resultante F2. Por tanto, en una forma más general, un cuerpo sujeto a dos fuerzas puede definirse como un cuerpo rígido sujeto a fuerzas que actúan únicamente en dos puntos. Entonces, las resultantes F1 y F2 deben tener la misma magnitud, la misma línea de acción y sentidos opuestos (ver figuras anteriores). En el estudio de estructuras, marcos y máquinas se verá que saber identificar los cuerpos sometidos a la acción de dos fuerzas simplifica la solución de ciertos problemas. |
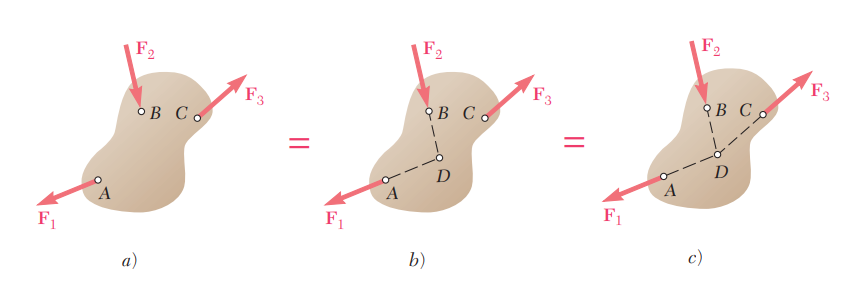
| EQUILIBRIO DE UN CUERPO SUJETO A TRES FUERZAS |
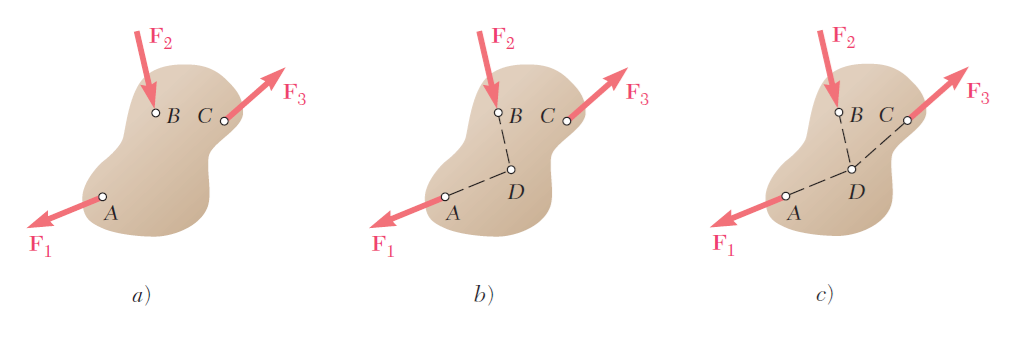
Otro caso de equilibrio que es de gran interés es aquel de un cuerpo rígido sujeto a tres fuerzas, esto es, un cuerpo rígido sobre el que actúan tres fuerzas o, en forma más general, un cuerpo rígido sometido a fuerzas que actúan sólo en tres puntos. Considérese un cuerpo rígido bajo un sistema de fuerzas que puede reducirse a tres fuerzas F1, F2 y F3 que actúan, respectivamente, en A, B y C (ver siguiente figura “a”). |
|
A continuación, se demostrará que, si el cuerpo está en equilibrio, las líneas de acción de las tres fuerzas deben ser concurrentes o paralelas. Como el cuerpo rígido está en equilibrio, la suma de los momentos de F1, F2 y F3 con respecto a cualquier eje debe ser igual a cero. Suponga que las líneas de acción de F1 y F2 se intersecan y al representar su punto de intersección con D, se suman momentos con respecto a D (ver figura “b”). Como los momentos de F1 y F2 con respecto a D son iguales a cero, el momento de F3 con respecto a D también debe ser igual a cero y la línea de acción de F3 debe pasar a través de D (ver “c”). Por tanto, las tres líneas de acción son concurrentes. La única excepción se da cuando ninguna de las líneas de acción se interseca; entonces, dichas líneas son paralelas. Aunque los problemas relacionados con cuerpos sujetos a tres fuerzas se pueden resolver por medio de los métodos generales de las secciones anteriores, la propiedad que se acaba de establecer puede utilizarse para resolverlos en forma gráfica o matemática a partir de relaciones trigonométricas o geométricas simples.
Para efectos de comprender mejor este tema, puedes ver el ejemplo 3.6 |
Ejemplo 3.6 |
| G. 02 | S.M. |
Trabajo de Fin de Lexia | |
ACTIVIDAD FIN DE LA LEXIA |